Planning van het optimale pad van AGV’s … of zijn het AMR’s?
nieuwe principes zorgen voor veiligheid en snelheid
Automatic Guided Vehicles (AGV’s) braken de afgelopen jaren helemaal door. Volgens cijfers van het International Federation of Robotics (IFR) steeg het aantal het aantal verkochte logistieke robotten in 2018 met maar liefst 60%. De reden daarvoor is niet ver te zoeken: de technologieën achter de geleiding van AGV’s zijn zo ver geëvolueerd dat ze vandaag zorgen voor een veilig transport van goederen zonder tussenkomst van een operator. Onder meer de technologie die het optimale pad bepaalt, ging met rasse schreden vooruit. Daarom wordt vandaag eerder over AMR gesproken: Autonomous Mobile Robots. En dan hebben we het nog niet gehad over de SDV’s: Self Driving Vehicles.
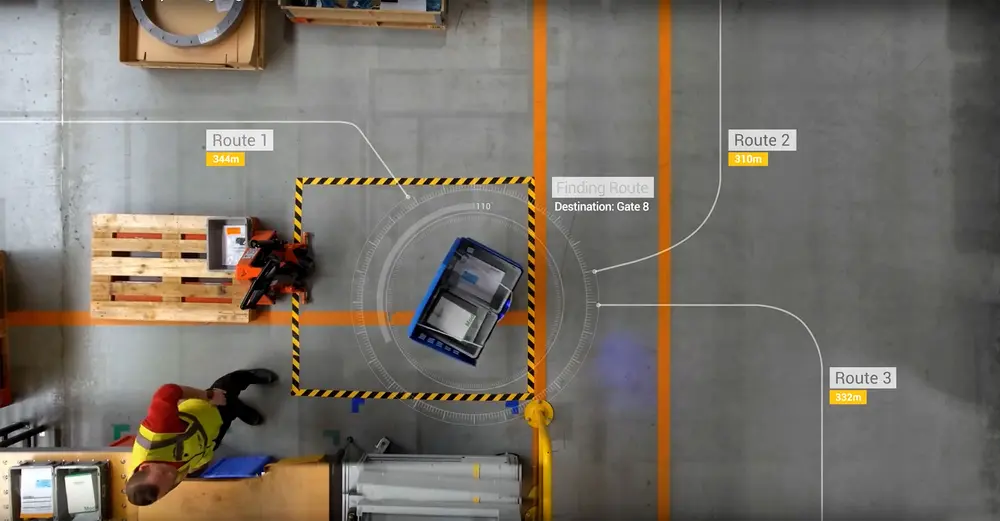
De uitdaging is om die trajecten ook uit te voeren onder wisselende omstandigheden
Fysieke geleiding was de norm
Bij de inzet van AGV werd aanvankelijk vooral gebruikgemaakt van fysieke geleiding. Dat kon op meerdere wijzes: via ingewerkte magneten of kabels in de vloer, maar ook met geschilderde lijnen, magnetische tape of op basis van inductie. Dat werkte – in de meeste gevallen – prima, maar had wel een belangrijk nadeel: de AGV bleef een ‘dom’ toestel dat veroordeeld was tot vooraf bepaalde paden. Wie een aanpassing van die paden wenste, moest de begeleidende installatie ook aanpassen. De intelligentie bleef bovendien beperkt tot het meten van de afgelegde afstand via encoders, wat diende om snelheidsveranderingen en stops te implementeren. Kortom, tot voor kort waren AGV’s toestellen die vooral interessant waren om voortdurend hetzelfde pad af te leggen; voor wisselende situaties waren ze minder geschikt.
Volgende generatie: AMR?
Producenten keken daarom naar alternatieve methodes om hun AGV’s op andere wijzes te leiden. De heilige graal binnen deze voertuigsector is dan ook het vrij bewegen door ruimtes, met een realtimeaanpassing van het pad indien er plotseling een obstakel op die weg opduikt. De eerder starre benadering van AGV’s moest dus plaatsmaken voor een methode die de beperkingen van fysieke geleiding naar het verleden verwees. Omdat dit in feite een compleet andere techniek is, opteerden de fabrikanten meteen ook voor een andere naam: AMR. Hier wordt uitgegaan van flexibele paden die met behulp van een interne digitale kaart en continue plaatsbepaling op die kaart de best mogelijke weg genereren. Het valt op dat deze distinctie tussen AGV en AMR vooral bij producenten gemaakt wordt.
Ons lijkt het eerder twee uitvoeringen te zijn van eenzelfde product, met enkel de geleidingsmethode als onderscheidende factor. Het is dus eigenlijk niet correct om AMR voor te stellen als het meer gesofisticeerde broertje van AGV, zoals vaak geclaimd wordt. In bepaalde applicaties zullen de ‘oude’ geleidingsmethodes zelfs betere resultaten geven.
De technologieën zijn intussen zo geëvolueerd dat ze zorgen voor een veilig transport van goederen zonder tussenkomst van een operator

Precisie is vaak een functie van dataverwerking en die is nog prijzig
Lidar
Meestal gebeurt de positiebepaling aan de hand van reflectoren die op zorgvuldig uitgekozen locaties geplaatst zijn, in combinatie met een zogenaamde Lidar-sensor (Laser Imaging Detection And Ranging), die voortdurend de positie van de AGV bepaalt door triangulatie van de gemeten afstanden van de teruggekaatste Near-Infrared-laserstralen van de reflectoren. Op die manier kunnen ook obstakels worden gedetecteerd en worden de AGV vertraagd of gestopt indien het object dit vereist.
Voordelen
De Lidar-techniek heeft het grote voordeel dat het werkt op basis van laser, dus aan de snelheid van het licht. Het principe gaat als volgt: via een pulserende laser en een zeer gevoelige detector wordt via meetprincipes zoals time-of-flight (de tijd meten tussen het verzenden en ontvangen van het signaal) of faseverschuiving de correcte afstand gemeten tussen AGV en detector. Als de laser nu zelf voortdurend snel beweegt, krijg je een reeks afstandsmetingen vanuit meerdere hoeken en/of richtingen. Door deze radiale coördinaten om te zetten in cartesiaanse coördinaten, creëer je een 3D-kaart van de omgeving.
Nadelen
Niettegenstaande een aantal duidelijke voordelen, heeft de Lidar-methode ook een belangrijk nadeel: er is steeds meervoudig contact nodig met de reflectoren. Zo niet, dan is de intelligentie in de AGV niet in staat om de nodige berekeningen uit te voeren. In een productieomgeving, met zijn bewegende machines, mensen en goederen kan dat weleens problematisch zijn. Daarom wordt Lidar vandaag steeds in combinatie met andere methodes ingezet.

3D-Visioncamera’s
Werking
Een van die succesvolle combi’s is het samenwerken met een camerasysteem. Het volstaat dan om met de AGV één keer door de infrastructuur te gaan (zie verder). Vervolgens zal het visionsysteem via beeldherkenning in staat zijn om exact de locatie van de AGV te bepalen en om aangegeven locaties terug te vinden. Het visionsysteem geeft in realtime informatie over de situatie rondom de AGV, die op dit punt in feite een AMR wordt, of een SDV, wat staat voor Self Driving Vehicle. Als we dat gaan combineren met de afstandsinformatie die de Lidar-sensoren bezorgen, wordt een dynamisch 3D-beeld gecreëerd van de omgeving. De uitdaging hierbij is om de informatie van beide systemen te linken aan elkaar.
Prijs relatief hoog
De performantie van visioncamera’s is vandaag beter geworden, ook al ligt de prijs nog relatief hoog. De achterliggende oorzaak daarvan is de kost voor dataverwerking, die bij visionsystemen toch een heel pak meer capaciteit vraagt. Vooral de bandbreedtes die de mapping nodig heeft, zijn werkelijk gigantisch: de voortdurende stroom van data, de analyse en filtering nemen heel wat gigabytes in beslag.
SLAM
Werkwijze
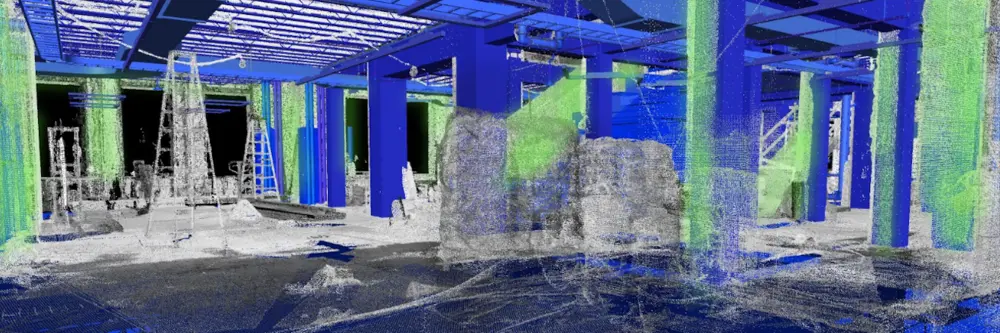
Simultaneous Localisation And Mapping (SLAM) is een relatief recente techniek, waarbij het werkveld van de AGV volledig ingescand wordt. Deze ingescande kaart is voor de AGV vervolgens de referentie om zijn exacte locatie en richting te bepalen. Als de AGV nu beweegt, zal hij voortdurend nieuwe oriëntatiepunten ‘zien’. De software zal die punten proberen te matchen met de oriëntatiepunten op de kaart. Door gebruik te maken van geavanceerde Kalman-filters, kunnen problemen zoals ruis worden onderdrukt. Daardoor kan niet enkel met relatieve zekerheid de locatie (positie én positionering) van de AGV worden bepaald, maar ook de snelheid en versnelling van lineaire en draaiende bewegingen.
Tweetrapssyteem
De Kalman-filter werkt in een tweetrapssysteem: eerst wordt de status op een gegeven ogenblik voorspeld aan de hand van de vorige status en de toepassing van de fysieke bewegingswetten, m.a.w. een inschatting van waar de AGV zich in theorie zou moeten bevinden. In de tweede fase wordt die berekening vergeleken met de input uit de gebruikte sensoren, zoals Lidar. Het verschil verkleinen tussen de berekende en effectieve status is het voorwerp van diverse studies, dus het einde van de performantiegroei is hier nog verre van bereikt. Om de correctie uit te voeren tussen berekende en effectieve positie, wordt gebruikgemaakt van rekenalgoritmes. Hier zijn 2 types in voege: scan-to-scan en scan-to-map-matching.
Scan-to-scan
Bij scan-to-scan worden twee opeenvolgende scans van een Lidar-sensor vergeleken, om zo een uitspraak te kunnen doen over de gewijzigde positie van de AGV tussen beide scans. Er is m.a.w. geen terugkoppeling naar een bestaande referentiemap. Dat is handig als die referentiemap de realiteit niet meer benadert – door wijzigingen in de omgeving – of als ze gewoonweg niet aanwezig is, zoals bij de start van een nieuw project. Het nadeel bij deze werkwijze is dat dezelfde meetfouten in opeenvolgende kaarten niet altijd als dusdanig herkend worden.
Scan-to-map-matching
Bij scan-to-map-matching wordt de scan van de Lidar-sensor punt per punt vergeleken met de ingeladen referentiekaart. Op basis daarvan kan dan de positie worden bepaald. Deze werkwijze elimineert het gevaar op zogenaamd ‘driften’, waarbij opeenvolgende fouten in kaarten steeds groter worden (zie afbeelding). Daar staat tegenover dat scan-to-map minder performant is in omgevingen met veel dezelfde set-ups (magazijnen met uniforme producten in uniforme rekken bijvoorbeeld). Als zo een verkeerde conclusie gemaakt wordt met betrekking tot de locatie, kunnen plotse verkeerde bewegingen niet worden uitgesloten. Om de AGV dan weer back on track te krijgen, is dan vaak menselijke inbreng nodig.
Verschillende versies op de markt
Vandaag zijn er heel wat vormen van SLAM op de markt, met bijvoorbeeld versies die in het Open Source-programma ROS (Robotic Operating System) ingezet kunnen worden. SLAM wordt vaak in combinatie gebruikt met Lidar-sensoren, al is dat verre van de enige techniek. Andere voorbeelden zijn onder meer plaatsbepaling via encoders, toerentaltellers, ultrasoonsensoren en sonar.
Gmapping
Ook Gmaping wordt ingezet als methode om kaarten te genereren. Bij Gmapping worden eveneens voortdurend kaarten van de omgeving gemaakt. Op basis van de info uit de Lidar-sensoren wordt vervolgens de beste match geselecteerd uit alle gemaakte kaarten. Zo kan de meest exacte positie van de AGV worden bepaald. Omdat deze procedure zich voortdurend herhaalt, kan ook voortdurend de positie van de AGV herberekend en geëvalueerd worden.

Aandachtspunten
3D-Lidar of 3D-stereocamera
De gebruikte rekenalgoritmes mogen dan steeds performanter worden, het eindresultaat wordt nog altijd grotendeels bepaald door de performantie van de sensoren. De inzet van Lidar-sensoren wordt omwille van de kostprijs vaak beperkt tot een 2D-uitvoering, waarbij dus geen dieptemeting uitgevoerd wordt. Dat kan wel eens tot problemen leiden bij lege rekken die zich op dezelfde hoogte bevinden als de sensor. De 2D-uitvoering ziet de diepte niet en de AGV rijdt tegen het rek. Het gebruik van 3D-Lidar of een 3D-stereocamera is dan aangewezen. Omdat de kosten daarvoor nog een stuk hoger liggen, kijkt men uit naar methodes om het dataverbruik te beperken, omdat dat de grote slokop is in de meerprijs. Extractie van bepaalde stukken uit het beeld is een mogelijke oplossing: enkel geselecteerde relevante locaties op de kaarten worden vergeleken, de rest moet het algoritme niet doorlopen. Voorwaarde is hier een robuust algoritme dat met een grote betrouwbaarheid deze gebieden kan bepalen. Geen sinecure, want factoren zoals invalshoek, belichting en reflectie moeten voortdurend worden afgewogen ten opzichte van elkaar, terwijl de AGV voortdurend in beweging is. De omstandigheden wijzigen dus continu.
Er zijn nog heel wat mooie zaken op til. Zo wordt de beperkende factor, de prijs voor dataverwerking, steeds minder uitgesproken
Wat brengt de toekomst?
Maar er zijn ongetwijfeld nog mooie zaken op til. Zo wordt de beperkende factor – de prijs voor dataverwerking – steeds minder uitgesproken. We zien vandaag dat intelligentie vaak in visioncamera’s geïntegreerd wordt in de gewone machineapplicaties. Waarom zou dit in de toekomst ook niet gedaan kunnen worden met de SLAM-algoritmes? Als die intelligentie al een deel van de data kan verwerken, kan de kost een pak naar beneden worden bijgesteld. Afwachten maar!

