Planning du trajet optimal des VGA … ou sont-ce des RMA?
De nouveaux principes de fonctionnement procurent sécurité et vitesse
Les véhicules à guidage automatique (VGA) ont totalement percé le marché ces dernières années. Selon les chiffres de l’IFR (International Federation of Robotics) le nombre d’achats de robots logistiques a augmenté de 60% en 2018. La raison ne doit pas être cherchée loin: les technologies derrière le guidage des VGA ont à ce point évolué qu’elles assurent aujourd’hui un transport sûr des marchandises sans intervention d’un opérateur. La technologie qui détermine le trajet optimal a notamment progressé à grands pas. C’est pourquoi on parle plutôt aujourd’hui de RMA: Robots Mobiles Autonomes. Et alors, on n’a même pas encore parlé des SDV: Self Driving Vehicles.
Le défi consiste à exécuter les trajets dans des conditions changeantes
Le guidage physique était la norme
Los de la mise en service des VGA, on utilisait surtout le guidage physique initialement. Cela s’opérait de différentes façons: via des aimants intégrés ou des câbles dans le sol mais aussi avec des lignes peintes, un ruban magnétique ou sur base de l’induction. Dans la plupart des cas, cela fonctionnait parfaitement mais avait un inconvénient important: le VGA restait un appareil ‘idiot’ condamné à des trajets pré-établis. Celui qui souhaitait adapter ces trajets devait aussi adapter l’installation d’accompagnement. De plus, l’intelligence restait limitée à la mesure de la distance parcourue via des encodeurs, ce qui servait à implémenter des changements de vitesse et des arrêts. En résumé, jusqu’il y a peu les VGA étaient surtout intéressants pour parcourir constamment le même trajet; ils convenaient moins aux situations changeantes.
La génération suivante: Rma?
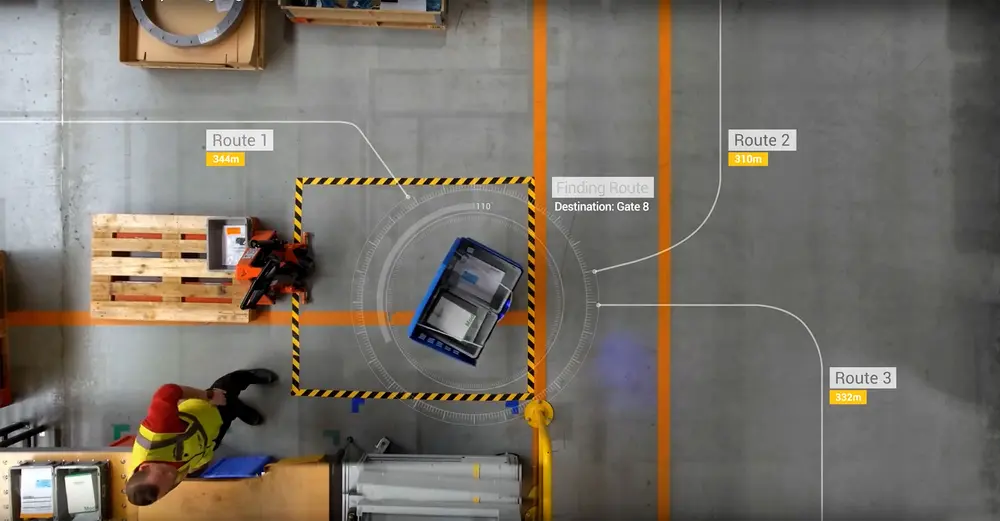
Les producteurs ont dès lors envisagé des méthodes alternatives pour guider leurs VGA autrement. Le Saint Graal dans ce secteur des véhicules est le déplacement libre à travers les espaces, avec une adaptation en temps réel du trajet en cas d’obstacle inopiné sur ce chemin. En conséquence, l’approche plutôt rigide des VGA devait faire place à une méthode qui renvoyait dans le passé les limites du guidage physique. Comme ceci est en fait une technique complètement nouvelle, les fabricants ont également opté d’emblée pour un autre nom: RMA. Ici on partait de trajets flexibles qui génèrent le meilleur chemin possible à l’aide d’une carte numérique interne et d’une localisation continue sur cette carte. Il est à noter que cette distinction entre VGA et RMA était principalement établie par les producteurs.
Cela nous semble plutôt deux exécutions d’un même produit, avec uniquement la méthode de guidage comme facteur distinctif. Il n’est donc pas correct de présenter le RMA comme le petit frère plus sophistiqué du VGA, comme souvent prétendu. Dans certaines applications, les ‘anciennes’ méthodes de guidage donneront même de meilleurs résultats.
Les technologies ont tellement évolue qu’elles assurent un transport sur des marchandises sans intervention d’un opérateur

La précision est souvent une fonction de traitement des données et celle-ci demeure onéreuse
Lidar
Généralement la localisation se fait à l’aide de réflecteurs placés à des endroits soigneusement choisis, associés à un dénommé capteur Lidar (Laser Imaging Detection And Ranging ou télédétection par laser), qui détermine constamment la position du VGA par triangulation des distances mesurées des rayons laser Near-Infrared réfléchis des réflecteurs. De cette manière, les obstacles peuvent également être détectés et les VGA sont ralentis ou arrêtés si l’objet l’exige.
Avantages
La technique Lidar a le grand avantage de fonctionner sur base du laser, donc à la vitesse de la lumière. Le principe est le suivant: via un laser à pulsions et un détecteur très sensible, on mesure la distance correcte entre le VGA et le détecteur via des principes de mesure tels que time-of-flight (mesurer le temps entre l’émission et la réception du signal) ou le glissement de phase. Le constant déplacement rapide du laser vous donne une série de mesures de distance à partir de plusieurs angles et/ou directions. En convertissant ces coordonnées radiales en coordonnées cartésiennes, vous créez une carte 3D de l’environnement.
Inconvénients
Nonobstant certains avantages évidents, le Lidar a un grand inconvénient: il faut toujours un contact multiple avec les réflecteurs. À défaut, l’intelligence dans le VGA ne peut pas exécuter les calculs requis. Dans un environnement de production, avec des machines, des hommes et des marchandises mobiles, ceci peut être problématique. Lidar est donc toujours combiné avec d’autres méthodes.

Caméras de vision 3D
Fonctionnement
L’une de ces combinaisons réussies est la collaboration avec un système de caméras. Il suffit alors de parcourir une seule fois l’infrastructure avec le VGA (voir plus loin). Ensuite le système de vision sera en mesure de déterminer la position exacte du VGA et de retrouver des emplacements indiqués. Le système de vision donne des informations en temps réel sur la situation autour du VGA, qui devient sur ce point un RMA en fait ou un SDV (Self Driving Vehicle). Si nous associons cela aux informations de distance que procurent les capteurs Lidar, on crée une image 3D dynamique de l’environnement. Le défi consiste à corréler les informations des deux systèmes.
Prix relativement élevé
La performance des caméras de vision s’est améliorée aujourd’hui, même si le prix reste relativement élevé, ceci à cause du coût du traitement des données, qui demande quand même nettement plus de capacité sur les systèmes de vision. Les largeurs de bande que nécessite le mapping sont surtout réellement gigantesques: le flux constant de données, l’analyse et la filtration réclament bien des gigaoctets.
SLAM
Méthode de travail
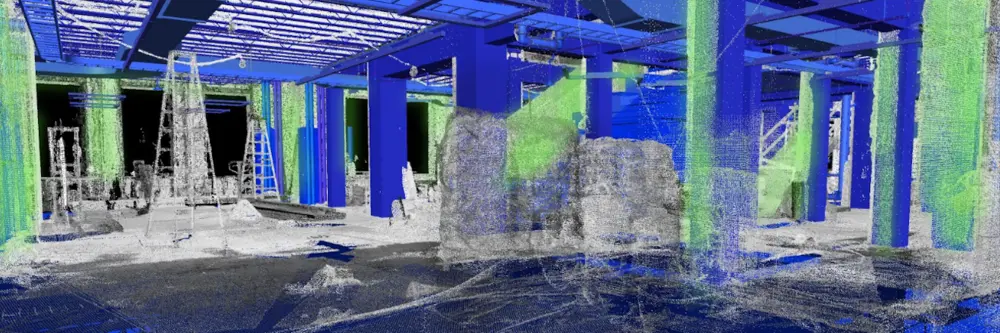
Simultaneous Localisation And Mapping (SLAM) est une technique relativement récente, selon laquelle le champ de travail du VGA est entièrement scanné. Cette carte scannée est ensuite la référence pour le VGA afin de déterminer sa position et sa direction exactes. Si le VGA se déplace, il ‘verra’ constamment de nouveaux points d’orientation. Le logiciel tentera de faire coïncider ces points avec les points d’orientation sur la carte. En utilisant des filtres Kalman avancés, on peut réprimer des problèmes tels que les parasites. Ceci permet de déterminer la localisation (position et positionnement) du VGA avec une relative certitude mais aussi la vitesse et l’accélération des mouvements linéaires et tournants.
Système à deux étages
Le filtre Kalman fonctionne dans un système à deux étages: d’abord on prédit l’état à un moment donné à l’aide de l’état précédent et de l’application des lois de mouvement physiques, en d’autres termes une estimation de l’endroit où le VGA devrait se trouver en théorie. Dans la seconde phase, ce calcul est comparé à l’input venant des capteurs utilisés, tels que Lidar. La réduction de la différence entre l’état calculé et l’état effectif fait l’objet – de diverses études, donc la fin de la croissance de la performance est loin d’être atteinte. Pour exécuter la correction entre les positions calculée et effective, on utilise des algorithmes de calcul, ici deux types sont en vigueur: scan-to-scan et scan-to-map matching.
Scan-to-scan
Dans le scan-to-scan, deux scans successifs d’un capteur Lidar sont comparés, pour pouvoir se prononcer sur la positon modifiée du VGA entre les deux scans. En d’autres termes, il y a une rétroaction vers une carte de référence existante. C’est pratique si la carte de référence n’approche plus la réalité – en raison de modifications dans l’environnement – ou si elle n’est tout simplement pas présente, comme au début d’un nouveau projet. L’inconvénient de cette méthode de travail est que les mêmes erreurs de mesure dans des cartes successives ne sont pas toujours identifiées comme telles.
Scan-to-map-matching
Dans le scan-to-map matching, le scan du capteur Lidar est comparé point par point à la carte de référence chargée. La position peut être déterminée sur cette base. Cette méthode de travail élimine le danger du ‘drifting’, les erreurs successives dans les cartes devenant de plus en plus grandes (voir illustration). En contrepartie le scan-to-map est moins performant dans des environnements avec de nombreuses configurations identiques (magasins avec des produits uniformes dans des rayonnages uniformes par exemple). Si une conclusion erronée est prise en relation avec l’emplacement, on ne peut exclure de soudains mouvements incorrects. Pour remettre le VGA sur la voie, il faut souvent un apport humain.
Différentes versions sur le marché
Aujourd’hui il existe de nombreuses formes de SLAM sur le marché, avec par exemple des versions pouvant être mises en œuvre dans le programme Open Source ROS (Robotic Operating System). Le SLAM est souvent combiné avec des capteurs Lidar, quoique ce ne soit pas la seule technique loin s’en faut. D’autres exemples sont notamment la localisation via des encodeurs, des compte-tours, des capteurs à ultrasons et un sonar.
Gmapping
Le Gmaping est aussi engagé comme méthode pour générer des cartes. Dans le Gmapping, des cartes de l’environnement sont constamment établies. Sur base des infos provenant des capteurs Lidar est ensuite sélectionné la meilleure correspondance parmi toutes les cartes établies. Ceci permet de déterminer la positon la plus exacte du VGA. Comme cette procédure se répète constamment, la position du VGA peut aussi être recalculée et évaluée constamment.

Points d’attention
Lidar 3D ou caméra stéréo 3D
Si les algorithmes de calcul utilisés sont de plus en plus performants, le résultat final reste en grande partie déterminé par la performance des capteurs. L’engagement de capteurs Lidar est souvent limité à une exécution 2D en raison du coût, donc sans l’exécution d’une mesure en profondeur. Ceci peut bel et bien engendrer des problèmes avec des rayonnages vides qui se situent à la même hauteur que le capteur. L’exécution 2D ne voit pas la profondeur et le VGA roule contre le rayonnage. L’utilisation du Lidar 3D ou d’une caméra stéréo 3D est alors préconisée. Comme les coûts associés sont nettement plus élevés, on envisage des méthodes pour limiter la consommation de données parce que ceci est le gros glouton dans le surcoût. L’extraction de certaines parties de l’image est une solution possible: seuls des emplacements pertinents sélectionnés sur les cartes sont comparés, l’algorithme ne doit pas traiter le reste. La condition ici est un algorithme robuste capable de déterminer ces zones avec une grande fiabilité. Ce n’est pas une sinécure parce que des facteurs tels que l’angle, l’éclairage et la réflexion doivent être évalués en fonction l’un de l’autre, tandis que le VGA est constamment en mouvement. Les conditions changent donc en continu.
De jolies choses sont en préparation. Le facteur limitatif, le prix du traitement des données, est de moins en moins marque
Que réserve l’avenir?
Mais de jolies choses sont en préparation. Le facteur limitatif – le prix du traitement des données – est de moins en moins marqué. Nous voyons que l’intelligence est souvent intégrée dans des caméras de vision dans des applications de machine ordinaires. Pourquoi ceci ne pourrait-il pas non plus être fait à l’avenir avec les algorithmes SLAM? Si cette intelligence est déjà capable de traiter une partie des données, le coût peut être nettement revu à la baisse. Il ne reste qu’à attendre!
