Makkelijker starten met Artificial intelligence
Flanders Make traint AI-algoritmen

Veel productiebedrijven staan voor uitdagingen waarop artificiële intelligentie een antwoord kan bieden, maar hiermee aan de slag gaan blijkt minder evident. Een AI-algoritme betrouwbare inschattingen laten maken vereist in vele gevallen enorm veel data om het model te trainen. Het strategisch onderzoekscentrum Flanders Make onderzoekt daarom manieren om het starten met AI te vergemakkelijken. Zo gebruikt het bijvoorbeeld digitaal gegenereerde trainingsdata om AI-algoritmes te trainen.
Voor velen is AI onbegonnen werk
Om een afwijking van het perfecte product te spotten, heeft het model in bepaalde gevallen duizenden tot zelfs honderdduizenden foto's nodig, van perfecte én defecte producten, uit alle mogelijke hoeken. Een tijdrovende taak dus.
Bovendien is het eveneens nodig om bij deze data annotaties te voorzien die aangeven wat het AI-algoritme in die foto zou moeten herkennen. Dit maakt het voor veel bedrijven onbegonnen werk om AI in te zetten op korte termijn.
De traditionele toepassing van AI is tijdsintensief en het is voor veel bedrijven onbegonnen werk om dit in te zetten op korte termijn
Trainen van AI-algoritmen
Daarom onderzoeken ze bij strategisch onderzoekscentrum Flanders Make manieren om het starten met AI te vergemakkelijken. Een voorbeeld hiervan zijn digitaal gegenereerde trainingsdata. Flanders Make gebruikt deze om een AI-algoritme te trainen. Een computer als leerkracht en leerling tegelijk, als het ware. Flanders Make toont de meerwaarde hiervan in twee concrete cases.
Efficiëntere Bin picking
Een taak die heel wat bedrijven automatiseren is bin picking, waarbij een robot en een visiesysteem samenwerken om voorwerpen uit containers te grijpen voor sortering, assemblage of andere doeleinden. Om deze taak te volbrengen is het correct herkennen van het object natuurlijk vitaal. Ook zijn oriëntatie bepalen is belangrijk, zodat het systeem weet hoe een robot het object moet opnemen en op de juiste plaats neerzetten.
Beperkingen van huidige bin picking
Gewoonlijk gebruiken bedrijven 3D-camera's om objecten in een bak of op een transportband te scannen en herkennen, waarna de robot individuele objecten kan vastnemen op basis van hun geometrische kenmerken. Hieraan komen zelden AI-algoritmen te pas.
De huidige aanpak heeft echter een aantal beperkingen:
• De technologie is behoorlijk prijzig, een 3D-camera kost al snel tussen de 10.000 en 15.000 euro.
• Het scannen is in de meeste gevallen gebaseerd op gepulseerd licht, een relatief traag proces. Door het lichtpatroon duurt het enkele seconden om de objecten te herkennen. Dit kan een stevige rem op het productieproces zetten of meer camera's dan nodig vereisen, wat de kostprijs verder verhoogt.
• Bij rekenalgoritmen wordt voor de herkenning een vast sjabloon met de gewenste geometrische kenmerken gebruikt. Dit maakt het moeilijk om grote variaties van objecten te herkennen of snel in te spelen op variërende omstandigheden.
• Het materiaal van de voorwerpen kan de zaak nog verder bemoeilijken – denk aan reflecterende metalen die het gepulseerde licht naar de camera terugkaatsen. Dit kan leiden tot onbetrouwbare resultaten omdat de vormen, in het oog van de camera, lijken af te wijken.
Goedkoper, nauwkeuriger en sneller
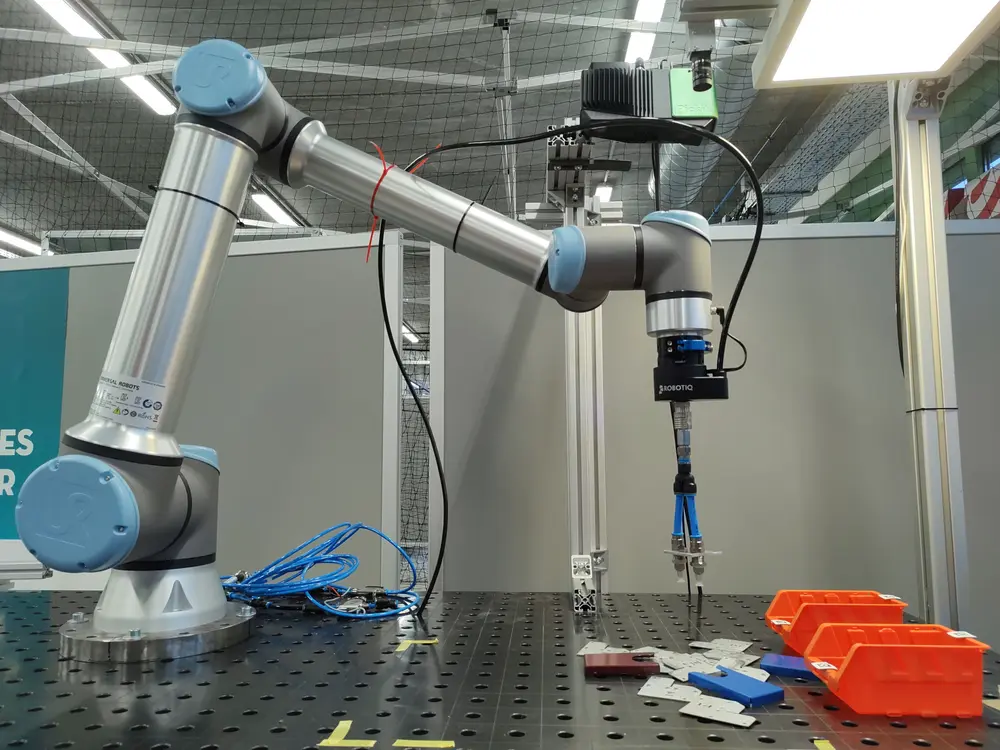
Flanders Make ontwikkelde een alternatieve oplossing die goedkoper, nauwkeuriger en sneller picken mogelijk maakt, met een standaard 2D-camera en AI-algoritmes. De resultaten van deze onderzoeken zijn behoorlijk spectaculair en kunnen betrouwbaar werken in extreme en wisselende omstandigheden.
Daarnaast heeft de voorgestelde oplossing ook bepaalde voordelen ten opzichte van de meer conventionele aanpak:
• Lagere hardwarekosten (< € 1.000 voor een geschikte 2D-camera).
• Een eenmalige en kleine investering om een groot aantal trainingsdatasets met gedetailleerde annotaties te genereren.
• Een optimalisatie van deze methode is mogelijk om in subseconden te werken.
• Injecteren van meer variabiliteit in de trainingsgegevens kan de nauwkeurigheid snel doen toenemen (met > 95%) en de robuustheid verbeteren.
Een CAD-tekening van het te herkennen object volstaat om de vereiste AI-algoritmes digitaal te trainen. Door die CAD-tekening te combineren met technieken die in videogames of 3D-animaties gebruikt worden om reflecties en oppervlaktetexturen te genereren, bouwen ze fotorealistische beelden op van een specifiek onderdeel. En dit voor uiteenlopende omstandigheden zoals verschillen in positie, belichting, reflectie, etc.
Deze aanpak maakt het een eenvoudige taak om vele 2D-beelden te genereren, met gedetailleerde annotaties van de inhoud. Handmatig benoemen wat op de foto te zien is, is niet meer nodig, omdat de computer exact weet in welke oriëntatie en omstandigheden die foto gegenereerd wordt. Het systeem voegt deze informatie dan ook automatisch toe.
CAD-modellen uitgebreid met variaties
Deze aanpak komt enerzijds tegemoet aan de vereiste om met een minimale inspanning toch heel veel trainingsgegevens te voorzien. Anderzijds bevatten die data ook een stuk meer variatie. Mocht een bedrijf al beschikken over 100.000 foto's van producten op een transportband, kan het AI-algoritme er plots naast zitten als er nieuwe verlichting in de hal geplaatst wordt en de reflecties veranderen.
Een CAD-tekening van het te herkennen object volstaat om de vereiste AI-algoritmes digitaal te trainen
Door de CAD-modellen uit te breiden met verschillende variaties, 3D-poses, geometrische kenmerken, achtergronden, oppervlaktepatronen en reflectiepatronen wordt de nauwkeurigheid en robuustheid van de AI-modellen verder verbeterd, ook in minder strikt gecontroleerde omgevingen.
Slimmere AGV-navigatie

AI-algoritmen trainen met computergegenereerde beelden is ook mogelijk in andere toepassingen. Zo fungeren vele computervisiesystemen als sensor voor automatisch gegidste voertuigen (AGV's) in een industriële omgeving. Deze AGV's kunnen verschillende taken uitvoeren: goederen verplaatsen, magazijnen inventariseren, inspectietaken uitvoeren, samenwerken met mensen voor het tillen van zware onderdelen, enzovoort.
Voor elk van deze taken is het belangrijk dat de AGV weet waar hij zich bevindt en welke obstakels zich op zijn pad bevinden. Een krachtige lokalisatietechniek is Simultaneous Localisation And Mapping (SLAM), waarbij beelden van een videostroom worden geanalyseerd op kenmerken die in de tijd kunnen worden gevolgd. Zo kan een AGV zich met behulp van een aantal herkenningspunten oriënteren, ook in overdekte locaties zonder pakweg gps.
Het doel is plaatsen te herkennen wanneer de AGV later terugkeert naar dezelfde plek, door de locaties van deze kenmerken met die in eerder gemaakte beelden te vergelijken. Hierdoor kan de AGV betrouwbaarder navigeren, aangezien hij heeft geleerd van de laatste keer dat hij deze locatie heeft bezocht.
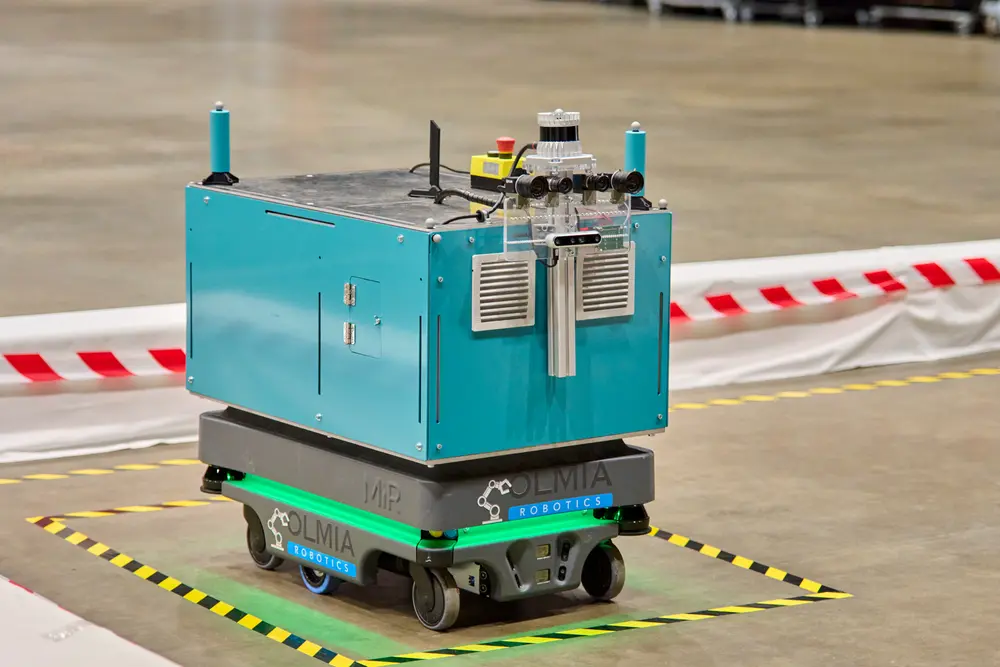
Deze volledig autonoom navigerende warehouserobot herkent mensen en andere tijdelijke obstructies en zoekt dan zelfstandig een andere route om op zijn bestemming te geraken
De traditionele SLAM-technieken volstaan echter niet. AGV's besturen in een omgeving waar mensen werken vereist veilig gedrag. Ze moeten ook in uitzonderlijke situaties adequaat reageren. Drift in het SLAM-algoritme of verplaatsende herkenningspunten kunnen er bijvoorbeeld toe leiden dat de AGV denkt dat hij zich op een andere locatie bevindt. De huidige geavanceerde versies van deze algoritmen maken immers geen onderscheid tussen statische en dynamische herkenningspunten.
Industriële omgevingen nabootsen
Ook hier stelt Flanders Make een andere aanpak voor om deze algoritmen te verbeteren. Ze gebruiken gesimuleerde beelden die industriële omgevingen nabootsen om een AI-algoritme te trainen in het herkennen van objecten en deze ook correct in te delen als dynamisch of statisch. Zo vermijden ze dat de AGV een tijdelijk geparkeerde heftruck als herkenningspunt opslaat en later de positionering in de war brengt.
Net zoals in de vorige case genereert een computer die beelden op een realistische manier en voorziet hij deze van correcte annotaties. Dit bespaart opnieuw tijd en kosten bij het aanmaken van datasets en laat een AGV ook toe om veelvuldig te trainen in een veilige, gesimuleerde omgeving. Dit laat meteen ook toe om het AI-algoritme te trainen op een manier die fouten mag maken zonder daarbij schade toe te brengen aan de omgeving.
AI in stroomversnelling
De barrières die de implementatie van AI in de industrie nog in de weg zaten worden in sneltempo weggewerkt, zoals bovenstaande cases illustreren. De betrouwbaarheid verbetert, de kosten dalen en de mogelijke toepassingen breiden zich steeds verder uit. De stroomversnelling waar AI nu in blijkt te zitten maakt het dan ook onvermijdelijk dat steeds meer bedrijven op de kar springen en dit implementeren in hun processen.
Artificiële intelligentie kan vrijwel elke sector grondig hervormen. In productiebedrijven helpt ze allerlei processen te optimaliseren, de kosten te verlagen en de productiviteit te verhogen. Door middel van machinelearning en data-analyse kunnen bedrijven hun processen beter begrijpen en beheren, waardoor ze beter geïnformeerde beslissingen kunnen nemen en betere resultaten kunnen behalen.
De winsten in efficiëntie en productiviteit die ze hier nu al mee boeken zijn vaak enorm. We zien ook AI verschijnen in predictive maintenance, slimme sorteringen van productiebatches, optimaliseren van inkoopplanningen, etc.
Er is dus een aanzienlijke kans dat ook uw bedrijf een proces kan optimaliseren met AI. Het komt er slechts op aan om deze processen te vinden.


