Se lancer plus facilement dans l'intelligence artificielle
Flanders Make forme des algorithmes d'IA

De nombreuses entreprises de production sont confrontées à des défis auxquels l'intelligence artificielle peut apporter une réponse, mais il est moins évident de l'utiliser. Pour qu'un algorithme d'IA puisse faire des estimations fiables, il faut souvent disposer d'une énorme quantité de données pour entraîner le modèle. Le centre de recherche stratégique Flanders Make étudie donc les moyens de faciliter l'utilisation de l'IA. Par exemple, il utilise des données de formation générées numériquement pour entraîner les algorithmes d'IA.
Pour beaucoup, l'IA est irréaliste
Pour repérer un écart par rapport au produit parfait, le modèle a parfois besoin de milliers, voire de centaines de milliers de photos, de produits parfaits ou défectueux, sous tous les angles possibles. Une tâche fastidieuse.
De plus, il est également nécessaire d'ajouter des annotations à ces données qui indiquent ce que l'algorithme d'IA doit reconnaître dans cette photo. Pour de nombreuses entreprises, il est donc impossible de déployer l'IA à court terme.
L'application traditionnelle de l'IA prend beaucoup de temps et son déploiement à court terme est irréaliste pour de nombreuses entreprises
Formation des algorithmes d'IA
C'est pourquoi le centre de recherche stratégique Flanders Make étudie les moyens de faciliter le démarrage de l'IA. Les données d'entraînement générées numériquement en sont un exemple. Flanders Make les utilise pour former un algorithme d'IA. Un ordinateur qui sert à la fois d'enseignant et d'apprenant, en quelque sorte. Flanders Make démontre la valeur ajoutée de cette méthode dans deux cas concrets.
Un prélèvement de bacs plus efficace
Une tâche que beaucoup d'entreprises automatisent est le "bin picking", pour laquelle un robot et un système de vision travaillent ensemble pour saisir des articles dans des conteneurs en vue de les trier, de les assembler ou de les utiliser à d'autres fins. Pour accomplir cette tâche, il est naturellement vital de reconnaître correctement l'objet. Il est également important de déterminer son orientation, afin que le système sache comment le robot doit saisir l'objet et le placer au bon endroit.
Limites du bin picking actuel
En général, les entreprises utilisent des caméras 3D pour scanner et reconnaître les objets dans un bac ou sur un convoyeur, après quoi le robot peut saisir les objets individuels en fonction de leurs caractéristiques géométriques. Cette méthode fait rarement appel à des algorithmes d'intelligence artificielle.
Toutefois, l'approche actuelle présente toutefois certaines limites:
• La technologie est assez coûteuse, une caméra 3D coûtant rapidement entre les 10.000 et 15.000 euros.
• Dans la plupart des cas, le balayage est basé sur la lumière pulsée, un processus relativement lent. En raison de la configuration de la lumière, il faut plusieurs secondes pour reconnaître les objets. Cela peut freiner considérablement le processus de production ou nécessiter plus de caméras que nécessaire, ce qui augmente encore le coût.
• Dans les algorithmes informatiques, un modèle fixe présentant les caractéristiques géométriques souhaitées est utilisé pour la reconnaissance. Il est donc difficile de reconnaître de grandes variations d'objets ou de réagir rapidement à des conditions variables.
• Le matériau des objets peut encore compliquer les choses – songez aux métaux réfléchissants qui renvoient la lumière pulsée vers la caméra. Cela peut conduire à des résultats peu fiables, car les formes, dans l'œil de la caméra, semblent dévier.
Moins cher, plus précis et plus rapide
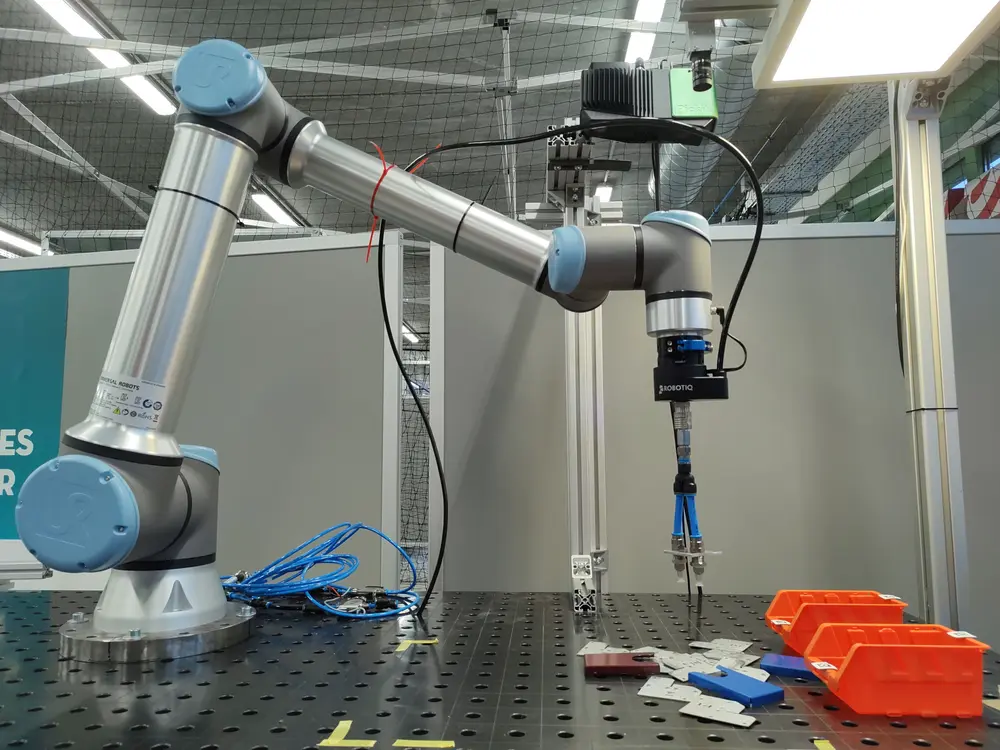
Flanders Make a développé une solution alternative qui permet un prélèvement moins cher, plus précis et plus rapide, en utilisant une caméra 2D standard et des algorithmes d'intelligence artificielle. Les résultats de ces études sont assez spectaculaires et peuvent fonctionner de manière fiable dans des conditions extrêmes et variables.
En outre, la solution proposée présente certains avantages par rapport à l'approche plus conventionnelle:
• Des coûts de matériel moins élevés (< 1.000 € pour une caméra 2D appropriée).
• Un investissement unique et limité pour générer un grand nombre d'ensembles de données d'entraînement avec des annotations détaillées.
• Une optimisation de cette méthode est possible pour travailler en moins d'une seconde.
• L'injection d'une plus grande variabilité dans les données d'entraînement peut rapidement augmenter la précision (de plus de 95%) et améliorer la robustesse.
Un dessin CAO de l'objet à reconnaître suffit pour entraîner numériquement les algorithmes d'IA requis. En combinant ce dessin CAO avec des techniques utilisées dans les jeux vidéo ou l'animation 3D pour générer des reflets et des textures de surface, ils construisent des images photoréalistes d'une pièce spécifique. Et ce, dans diverses conditions telles que les différences de position, d'éclairage, de réflexion, etc.
Cette approche permet de générer facilement de nombreuses images 2D, avec des annotations détaillées du contenu. Il n'est plus nécessaire de nommer manuellement ce qui peut être vu dans l'image, car l'ordinateur sait exactement dans quelle orientation et dans quelles conditions l'image a été générée. Le système ajoute donc ces informations automatiquement.
Modèles CAO étendus avec des variations
D'une part, cette approche répond à l'exigence de fournir un grand nombre de données de formation avec un minimum d'efforts. D'autre part, ces données contiennent également beaucoup plus de variations. Si une entreprise dispose déjà de 100.000 photos de produits sur un convoyeur, l'algorithme d'IA peut soudainement se tromper si un nouvel éclairage est placé dans le hall et que les reflets changent.
Un dessin CAO de l'objet à reconnaître suffit pour entraîner numériquement les algorithmes d'IA nécessaires
L'extension des modèles CAO pour inclure différentes variations, poses 3D, caractéristiques géométriques, arrière-plans, motifs de surface et motifs de réflexion améliore encore la précision et la robustesse des modèles d'IA, même dans des environnements moins strictement contrôlés.
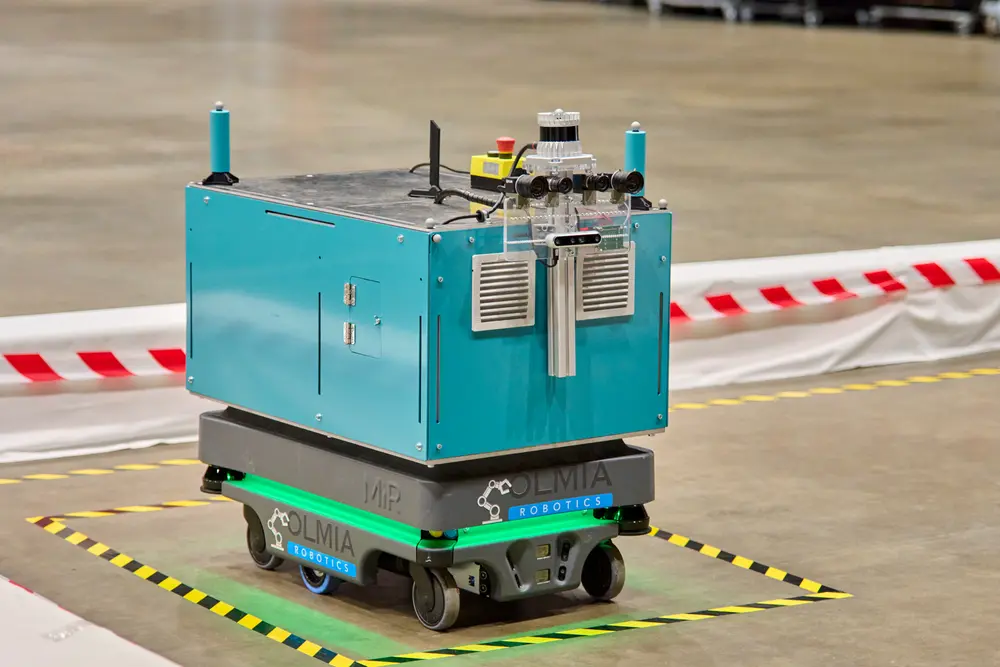
Une navigation vgA plus intelligente

L'entraînement d'algorithmes d'IA à l'aide d'images générées par ordinateur est également possible dans d'autres applications. Par exemple, de nombreux systèmes de vision par ordinateur servent de capteurs pour les véhicules à guidage automatique (AGV) dans les environnements industriels. Ces VGA peuvent effectuer diverses tâches: déplacer des marchandises, inventorier des entrepôts, effectuer des tâches d'inspection, coopérer avec des humains pour soulever des pièces lourdes, etc.
Pour chacune de ces tâches, il est important que le VGA sache où il se trouve et quels sont les obstacles qui se trouvent sur son chemin. Une technique de localisation puissante est la localisation et la cartographie simultanées (SLAM), qui analyse les images d'un flux vidéo à la recherche de caractéristiques pouvant être suivies dans le temps. Cela permet à un VGA de s'orienter à l'aide d'un certain nombre de points de repère, même dans des lieux couverts sans GPS, disons.
L'objectif est de reconnaître des lieux lorsque le VGA revient plus tard au même endroit, en comparant les emplacements de ces caractéristiques avec ceux des images capturées précédemment. Cela permet au VGA de naviguer de manière plus fiable, car il a appris de la dernière fois qu'il a visité cet endroit.
Cependant, les techniques SLAM traditionnelles ne suffisent pas. L'utilisation de VGA dans un environnement où des personnes travaillent exige un comportement sûr. Ils doivent réagir de manière appropriée, même dans des situations exceptionnelles. Une dérive de l'algorithme SLAM ou un déplacement des points de repère, par exemple, peuvent amener le VGA à penser qu'il se trouve à un autre endroit. En effet, les versions avancées actuelles de ces algorithmes ne font pas la distinction entre les repères statiques et dynamiques.
Imitation des environnements industriels
Là encore, Flanders Make propose une approche différente pour améliorer ces algorithmes. Ils utilisent des images simulées qui imitent les environnements industriels pour entraîner un algorithme d'IA à reconnaître les objets et à les répertorier correctement comme dynamiques ou statiques. Ils évitent ainsi aux VGA de mémoriser un chariot élévateur temporairement garé comme point de repère et de confondre ultérieurement son positionnement.
Comme dans le cas précédent, un ordinateur génère ces images de manière réaliste et les accompagne d'annotations correctes. Cela permet à nouveau d'économiser du temps et de l'argent lors de la création d'ensembles de données et permet également à un VGA de s'entraîner fréquemment dans un environnement sûr et simulé. Cela permet également d'entraîner immédiatement l'algorithme d'IA de manière à ce qu'il puisse commettre des erreurs sans nuire à l'environnement.
L'IA à la vitesse supérieure
Les obstacles qui freinaient encore la mise en œuvre de l'IA dans l'industrie sont levées à un rythme soutenu, comme l'illustrent les cas ci-dessus. La fiabilité s'améliore, les coûts diminuent et les applications potentielles se multiplient. L'élan que semble prendre l'IA rend inévitable le fait que de plus en plus d'entreprises prennent le train en marche et l'intègrent dans leurs processus.
L'intelligence artificielle peut profondément remodeler presque tous les secteurs. Dans les entreprises manufacturières, elle permet d'optimiser toutes sortes de processus, de réduire les coûts et d'augmenter la productivité. Grâce à l'apprentissage automatique et à l'analyse des données, les entreprises peuvent mieux comprendre et gérer leurs processus, ce qui leur permet de prendre des décisions plus éclairées et d'obtenir de meilleurs résultats.
Les gains d'efficacité et de productivité qu'elles en retirent déjà sont souvent énormes. On voit également apparaître l'IA dans la maintenance prédictive, le tri intelligent des lots de production, l'optimisation des plannings d'approvisionnement, etc. Il y a donc de fortes chances que votre entreprise puisse elle aussi optimiser un processus grâce à l'IA. Il s'agit simplement de trouver ces processus.
