MoMa is onvermoeibare kleine zelfstandige
Veelzijdig, krachtig, flexibel én autonoom
Een mobiele manipulator is een geavanceerd, veelzijdig robotsysteem behorend tot de categorie Autonome Mobiele Robots (AMR's). Door een combinatie van mobiliteit en manipulatie zijn deze in staat uiteenlopende, complexe taken uit te voeren in dynamische en/of gevaarlijke omgevingen. De wetgeving is nog volop in ontwikkeling en mede daardoor tamelijk complex. Dat brengt verplichtingen met zich mee, maar de technologische ontwikkelingen die hier uit voorkomen maken weer veel goed.

Kenmerken
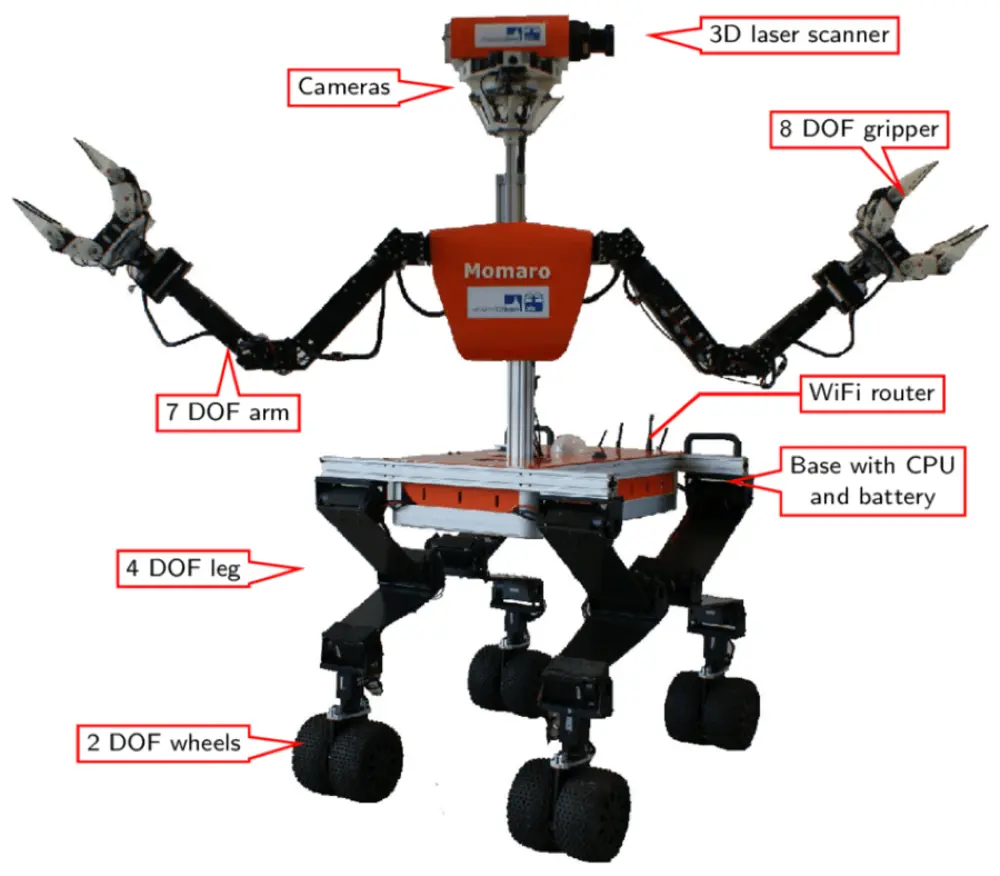
Een mobiele manipulator – roepnaam: MoMa – bestaat uit een mobiele basis en een of meerdere robotarmen, de zogeheten manipulatoren. Door de mobiliteitsvoordelen te combineren met de precisie en flexibiliteit van de robotarmen is de MoMa in staat complexe taken uit te voeren in een dynamische omgeving.
De mobiele basis bestaat uit een platform of voertuig dat bijvoorbeeld is voorzien van mechanische poten (leg based), rupsbanden (tracked based) of wielen (wheeled based). De daarop aanwezige apparatuur helpt met navigeren en het vermijden van obstakels. Voor het uitvoeren van complexe taken als orderpicking en assemblage moeten de manipulatoren nauwkeurig zijn en beschikken over meerdere vrijheidsgraden. Eindeffectoren, al dan niet met camera, helpen daarbij.
Begrippenkader
• Haptische feedbacksystemen bieden tactiele en kinesthetische informatie via sensoren en actuatoren, waardoor de MoMa tijdens de objectmanipulatie kracht en feedback 'voelt'.
• IMU – Inertial Measurement Unit – een systeem van gyroscopen en versnellingsmeters voor het meten van beweging en oriëntatie.
• LIDAR – Light Detection and Ranging – een sensortechnologie waarmee onder gebruikmaking van laserlicht driedimensionale omgevingsbeelden kunnen worden gecreëerd.
• Obstacle avoidance is een systeem dat via sensoren – onder meer ultrasonische, infrarode, LIDAR of camerasensoren – de omgeving scant en obstakels detecteert.
• Odometry is een techniek voor het nauwkeurig positioneren en laten bewegen van de robotarm op basis van realtimedata.
• Padplanning betreft methoden en algoritmen die worden gebruikt om de optimale route voor de robotarm te bepalen teneinde obstakels te vermijden.
• RFID – Radio Frequency Identification – een techniek waarmee objecten met behulp van radiogolven kunnen worden geïdentificeerd en/of automatisch kunnen worden gevolgd.
• RGB-camera is een type digitale camera die afbeeldingen vastlegt door gebruik te maken van de primaire kleuren rood (R), groen (G), en blauw (B).
• Safety Integrity Levels (SIL) is een classificatiesysteem voor het vaststellen van het niveau van betrouwbaarheid dat een veiligheidssysteem ter beheersing van een specifiek risiconiveau moet bieden. Hoe hoger het SIL-niveau des te strenger de ontwerp-, implementatie-, test- en onderhoudsprocedures.
• Vrijheidsgraden – degrees of freedom, DOF – zijn het aantal onafhankelijke bewegingen waartoe een robotarm in staat is. Bij 6 DOF zijn dat bewegingen in de x-, y- en z-richting en draaien om de x-, y- en z-as.
Besturing
Bij MoMa's worden de mobiele basis en de manipulatorarm aangedreven door elektromotoren terwijl encoders en gyroscopen zorgen voor de gewenste precisie, stabiliteit en controle. Geavanceerde software regelt de onderlinge coördinatie, al dan niet samen met AI en/of machine learning. Positiebepaling, lokalisatie en navigatie zijn daarbij essentieel. Technieken voor de ruimtelijk oriëntatie zijn onder meer LIDAR, RFID en GPS, voor de lokalisatie zijn dat SLAM en Odometry en voor de navigatie padplanning en obstacle avoidance.
MoMa's zijn uitgerust met geavanceerde besturingssystemen die zowel de mobiliteit als de manipulatie coördineren
Voor het 'waarnemen' van de omgeving worden GPS en LIDAR gebruikt, aangevuld met de informatie van RGB- en dieptecamera's, microfoons, ultrasone, infrarood-, druk- en tactiele sensoren en die van Inertial Measurement Unit (IMU) en haptische feedbacksystemen. Een centraal besturingssysteem integreert realtime alle gegevensinput, voert de lokalisatie- en navigatie-algoritmen uit en stuurt de actuatoren aan om de geplande bewegingen uit te voeren.

Wet- en regelgeving
De wet- en regelgeving voor AMR's is voortdurend aan verandering onderhevig. Het staat landen bovendien vrij aanvullende wet- en regelgeving te hanteren gebaseerd op de eigen veiligheidseisen, arbeidswetten en industriële normen.
Algemene veiligheidsnormen
- ISO 10218-1 en ISO 10218-2: internationale standaard die de veiligheidsvereisten voor industriële robots en robotsystemen specificeert. Deze zijn aangepast om de integratie van mobiele systemen beter te ondersteunen, met extra aandacht voor veilige interactie tussen mens en robot.
- ISO/TS 15066: technische specificatie met richtlijnen voor cobots waarbij interactie met mensen optioneel is. Deze biedt gedetailleerde richtlijnen voor een veilige interactie inclusief biomechanische limieten voor directe en indirecte interactie teneinde letsel te voorkomen.
Functionele veiligheidsnormen/-richtlijnen
- IEC 61508: deze norm heeft betrekking op de functionele veiligheid bij de integratie van robottechnologieën. Het toepassingsgebied is onlangs uitgebreid en heeft nu ook betrekking op systemen die mobiele manipulatoren aansturen.
- IEC 62061: norm voor het ontwerpen, implementeren en onderhouden van elektrische dan wel (programmeerbare) elektronische veiligheidssystemen in machines alsook procedures voor het testen en valideren daarvan. Deze norm introduceert het begrip Safety Integrity Level (SIL).
- MoMa's dienen een uitgebreide veiligheidsanalyse te ondergaan waaronder die horende bij de Europese machinerichtlijn (2006/42/EG). Een machine moet aan de daarin gestelde eisen voldoen en dient een conformiteitsbeoordelingsprocedure te doorlopen, bij goed gevolg resulterend in een CE-markering.

Richtlijnen voor autonome systemen
- ISO 3691-4: standaard die de veiligheidsvereisten voor industriële voertuigen zonder bestuurder en de bijbehorende systemen regelt. Speerpunten daarbij zijn ontwerp, constructie, prestaties, en operationele veiligheid.
- CE-markering: markeringseisen die garanderen dat het product voldoet aan de EU-veiligheids-, gezondheids- en milieubeschermingsvereisten. De markering garandeert dat het product voldoet aan alle relevante EU-richtlijnen en verordeningen.
- Europese Machinerichtlijn (2006/42/EC): wijzigingen hierin hebben geleid tot strengere veiligheidseisen met betrekking tot ontwerp en constructie. Tevens heeft harmonisatie plaatsgevonden met onder meer ISO en IEC.
- Het Institute of Electrical and Electronics Engineers (IEEE): werkt aan normen voor (semi)autonome systemen, waaronder MoMa's, om te komen tot een verbeterde veiligheid en interoperabiliteit.
Specifieke regelgeving en normen
- ANSI/RIA R15.06: de norm voor het ontwerpen, bouwen, integreren en gebruik van robotsystemen. Deze is recentelijk geharmoniseerd met ISO 10218-1 en ISO 10218-2, terwijl de eisen voor het uitvoeren van risicobeoordelingen en het implementeren van veiligheidsmaatregelen zijn aangescherpt.
- UL 3100: een norm ontwikkeld door Underwriters Laboratories (UL), een onafhankelijk, mondiaal opererend bedrijf gericht op veiligheidswetenschap. De norm betreft veiligheidseisen en -richtlijnen voor het ontwerp, de constructie en de werking van zonder menselijke interventie opererende robots.
Gedeelde verantwoordelijkheid
De integrator voorziet in:
- relevante veiligheidsnormen en -voorschriften;
- een uitgebreide risicobeoordeling;
- het functioneel testen van geïmplementeerde maatregelen;
- software die voldoet aan de normen voor functionele veiligheid en periodiek wordt voorzien van updates en patches;
- documentatie over en trainingen in veilig gebruik en onderhoud.
De eindgebruiker voorziet in:
- installatie en gebruik conform fabrieksinstructies inclusief trainingen;
- een risicobeoordeling en het opstellen van noodprocedures;
- veiligheidsinspecties en periodiek onderhoud;
- melding van incidenten/veiligheidsproblemen en schadebeperking;
- continue monitoring van de effectiviteit van de veiligheidsmaatregelen.

Stappenplan risicobeoordeling
Een risicobeoordeling moet plaatsvinden aan het begin van de implementatieprocedure, en vergt expertise op het gebied van MoMa-technologie, mechanica en veiligheid. Er zijn zeven stappen:
- Vaststellen van de operationele grenzen en beperkingen op basis van het type MoMa en de werkomgeving waarin deze opereert.
- Gevareninventarisatie waarbij de gevaren in kaart worden gebracht die zich kunnen voordoen onder invloed van mechanische bewegingen, elektrische systemen, omgevingsfactoren, software- en systeemstoringen en/of menselijke fouten.
- Risicoanalyse waarbij per gevarencategorie wordt bepaald wat de impact is op mens, materiaal en omgeving. Een risicomatrix helpt de risico's te kwantificeren op basis van ernst en waarschijnlijkheid.
- Risicobeperking door het ontwikkelen en implementeren van risicoverlagende maatregelen waaronder veiligheidsbevorderende ontwerpmaatregelen, technische, administratieve en/of beschermingsmaatregelen.
- Verificatie en validatie, het uitvoerig testen van de effectiviteit van de risicobeperkende maatregelen om vervolgens aan de hand van de testresultaten te bepalen of resterende risico's al dan niet aanvaardbaar zijn.
- Documentatie en communicatie waarbij de geïdentificeerde gevaren, de risicoanalyse en de genomen maatregelen worden vastgelegd; tekeningen, schema's en testresultaten komen in het risicobeoordelingsrapport. Het personeel wordt van beide in kennis gesteld.
- Periodieke evaluatie van het functioneren van de MoMa en de effectiviteit van de risicobeperkende maatregelen. De resultaten daarvan, nieuwe ontwikkelingen, incidenten en/of veranderingen worden in de risicobeoordeling meegenomen waarna deze verder wordt aangescherpt.
Een voorbeeld is de Hazard Rating Number (HRN)-methodiek. Daarbij wordt aan factoren als 'waarschijnlijkheid', 'frequentie van blootstelling', 'afwendbaarheid' en 'mogelijke gevolgen' een score toegekend. De HRN is het product daarvan en helpt bij het prioriteren van risico's en het nemen van passende veiligheidsmaatregelen.

Voorbeelden van risicobeheer
Botsing met personeel
De kans hierop is betrekkelijk gering, maar het risico is hoog aangezien een botsing ernstige kan veroorzaken. Preventief werken:
- veiligheidssensoren die menselijke aanwezigheid detecteren en de robot tijdig stoppen;
- fysieke afscherming zodat personeel buiten de gevarenzone blijft;
- training van het personeel inzake veilige werkprocedures.
Optreden van een elektrische schok
De kans hierop is gering tenzij er sprake is van ontwerpfouten of gebrekkig onderhoud. De gevolgen kunnen echter ernstig of zelfs dodelijk zijn. Preventief werken:
- periodieke inspectie en onderhoud van de elektrische systemen;
- gebruik van isolatiematerialen en aarding;
- het plaatsen van waarschuwingsborden en noodstopknoppen.
Technologische veranderingen
Door de steeds strenger wordende wet- en regelgeving ondergaan MoMa's allerhande technologische veranderingen. Zo wordt voor de ruimtelijke oriëntatie en navigatie steeds vaker gebruikgemaakt van SLAM-systemen (SLAM staat voor Simultaneous Localization and Mapping). Een dergelijk systeem stelt de robot in staat de omgeving te monitoren en daarin zijn eigen positie te bepalen waarbij 3D-camera's helpen realtime-3D-kaarten van de omgeving te creëren. Dit verbetert de navigatie en voorkomt botsingen met obstakels en/of mensen.
Geavanceerde software verzorgt de onderlinge coördinatie, al dan niet in combinatie met AI en/of machine learning
Dit alles vergt gevalideerde softwarecomponenten: grondig geteste softwaremodules en/of onderdelen. Voorbeelden daarvan zijn gecertificeerde softwarebibliotheken en besturingssystemen die voldoen aan de normen voor functionele veiligheid, waaronder IEC 61508. Dankzij het gebruik van realtimemonitoring en feedbacksystemen – draadloos dan wel via haptische feedback – worden MoMa's steeds veiliger. Cobots zijn tegenwoordig voorzien van kracht- en snelheidslimieten en van geavanceerde kracht-/momentdetectie die registratie van minimale aanraking en krachten mogelijk maakt. En mocht het onverhoopt toch misgaan, dan zorgt veiligheidslogica ervoor dat de MoMa's veilig worden uitgeschakeld.

Met medewerking van Pilz, Routeco en Schmersal



