Prima technologie, praktische bezwaren
Exoskeletten doorgelicht

Digitale werkinstructies, cobots, touchscreens … de afgelopen jaren zagen we mooie innovaties opduiken die een gezamenlijke doel hadden: operatoren het werk makkelijker maken. Dat gaat ook op voor exoskeletten, al zitten we bij deze technologie nog in het begin van de praktische leercurve. In die fase wordt de technologie geconfronteerd met bezwaren die in reële settings opduiken.
Vermijd blessures
In essentie zit er natuurlijk een mooie gedachtegang achter de technologie. Ze kan worden ingezet in meerdere sectoren, waarbij de gezondheidszorg (hulp bij het terug leren stappen bijvoorbeeld) en de industrie twee belangrijke pijlers vormen. In dit stuk beperken we ons uiteraard tot deze laatste categorie en zullen we het zowel over aangedreven als passieve exoskeletten hebben. Passieve systemen slaan de bewegingsenergie die de werknemer zelf produceert op via veren en dempers, om ze vervolgens terug in te zetten bij hefbewegingen. Bij aangedreven exoskeletten is er een externe aandrijving die deze kracht levert. In het laatste geval is er ook een controller met bijhorende sensoriek vereist, maar daarover later meer.

Er zijn overigens wel meer onderverdelingen te maken in de wereld van de exoskeletten. Zo is het ondersteunde lichaamsdeel een vaak gemaakt verschil. Zo zijn er exoskeletten voor de onderste die het wandelen of staan kunnen ondersteunen, exoskeletten die de romp ondersteunen of exoskeletten die de arm ondersteunen bij eenvoudige handmatige taken. Voorts zijn er de zogenoemde fullbody exoskeletten die al deze ondersteunende functies combineren. Daarnaast wordt ook weleens een opdeling gemaakt tussen antropomorfe en niet-antropomofe skeletten, waarbij de eerste nauw aansluit bij de bouw van het menselijk lichaam.

Nog veel werk aan de exowinkel
De reden waarom we exoskeletten een interessante technologie noemen, hoeven we niet ver te zoeken. Heffen en manipuleren is helaas vaak nog een puur manueel gegeven. Niet alles kan worden getild door heftrucks, robots, lieren, rolbruggen of andere heftoestellen. Dat leidt tot een rits aan lichamelijke problemen bij werknemers. Het gros daarvan is op het conto te schrijven van overbelastingen door het opheffen en manipuleren van de goederen of door repetitieve bewegingen uit te voeren. In ons land - met een gemiddeld oude bevolking en stijgende pensioenleeftijd - is dat dus zéker een reden om alle mogelijke pistes te onderzoeken die kunnen leiden tot minder klachten.
Exoskeletten kunnen een hulpmiddel zijn om klachten te reduceren, maar ze zitten nog volop in de implementatiefase. We zien dat ze vandaag uitvoerig getest worden op de bedrijfsvloer, maar op de echte doorbraak is het nog wachten. Het internet staat dan wel vol met blitse sites van aanbieders, maar in de praktijk blijken er toch nog enkele praktische hinderpalen die de goede werking belemmeren.
Vooral op het gebied van gebruiksgemak blijkt er nog werk aan de winkel. Zo moet (de besturing van) een exoskelet best specifiek worden aangepast aan de anatomie van de gebruiker om een optimaal resultaat te bekomen. Dat betekent dus telkens opnieuw instellen bij een overgang van de shift, wat de nodige tijd vraagt. Voor elke werknemer een eigen exoskelet bestellen, blijkt dan weer financieel moeilijker te liggen.
Telkens opnieuw instellen bij een overgang van de shift vraagt de nodige tijd
Ook zeer eenvoudige praktische bezwaren staan wat in de weg: zo vinden werknemers het bijvoorbeeld het systeem te omslachtig om uit te trekken bij een sanitaire stop of is het uit- en terug aantrekken te tijdrovend tijdens hun beperkte middagpauze.
Ook tijdens het werken zelf zijn er nog enkele verzuchtingen, zoals de beperktere mobiliteit. Hoewel exoskeletten wel degelijk hun nut bewijzen en hun doel als hefhulp vlekkeloos bereiken, klagen werknemers vooral over de belemmering van hun bewegingsvrijheid. Zeker als de heftaken van de werknemer maar een klein deel uitmaken van het volledige takenpakket, zien we voorlopig weinig meerwaarde.
Bovendien is er nog een psychologische barrière: wie geen klachten heeft, zal ook niet snel geneigd zijn om een bewegingsbeperkend exoskelet te dragen. Pas als het te laat is, ziet men pas het nut in van deze oplossing. Tot slot is ook de ROI moeilijk te meten. De mogelijke productiviteitsgroei door sneller te werken, of zaken alleen te heffen in plaats van met twee is onduidelijk als men deze afmeet tegen de extra tijd die het aantrekken, instellen en beperkte mobiliteit in rekening neemt. Daar komt nog bovenop dat de winst in termen van absenteïsme nog onduidelijk is. Bedrijven zijn dus nog wat weigerachtig om de investering nu al te maken.
Technologische opbouw
Om te duiden hoe we deze hinderpalen in de toekomst kunnen aanpakken, moeten we ons verdiepen in de technologie en de evoluties daarin. Zo kunnen we aanduiden waar de potentiële verbeterpunten zich bevinden.
Passieve exoskeletten
Bij passieve exoskeletten gaat het meestal om deelondersteuning van bepaalde lichaamsdelen. Via een systeem met dempers en veren worden bijvoorbeeld repetitieve taken ondersteund. Een voorbeeld hiervan zijn de exoskeletten voor de bovenste ledematen die dienen om repetitieve montagetaken in de voertuigsector boven het hoofd te faciliteren. Omdat deze oplossingen geen gebruik maken van de combinatie van actuatoren en motoren, is er ook geen batterijpack noch externe voeding vereist. Dat levert een belangrijk voordeel op in termen van gewicht en ergonomie. Aan de contra-zijde vinden we dan weer de eerder beperkte payload in vergelijking met aangedreven systemen, terwijl ook de bewegingscontrole grotendeels ontbreekt.

Aangedreven exoskeletten
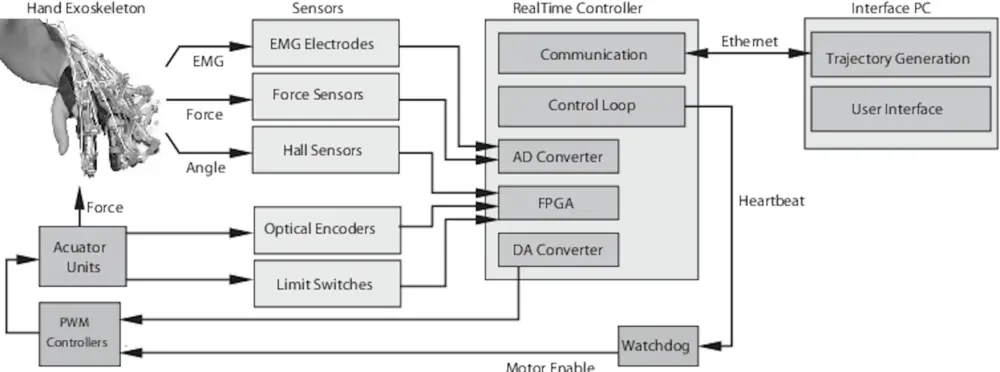
Een actief of aangedreven exoskelet bestaat uit een metalen framework dat rond het lichaam van de werknemer geplaatst wordt. Dat framework is op de strategische plaatsen voorzien van actuatoren die de beweging van de werknemer zullen ondersteunen. De actuatoren worden aangestuurd door de controller, die op zijn beurt de beslissing tot actuatie - en de vorm daarvan - baseert op de input die hij krijgt via de sensoren.
We zullen al deze onderdelen verder toelichten.
Framework
Het beperken van gewicht is uiteraard zeer belangrijk om de ergonomie van de gebruiker te vergroten. Daar staat tegenover dat die beperking geen negatieve invloed mag hebben op de sterkte van het materiaal en de flexibiliteit. Koolstofvezel is bijvoorbeeld een vaak gebruikt materiaal, maar ook versterkt aluminium, titanium of staallegeringen worden frequent ingezet.
Sensoren
Er worden meerdere types sensoren ingezet bij exoskeletons. In de ideale situatie zou de controller enkel het eigen gewicht van het skelet en dat van het heffend ledemaat van de gebruiker moeten compenseren, waarbij enkel de momentane extra belasting moet in acht worden genomen als dynamische factor. In de realiteit is dat proces veel minder afgelijnd: de persoon beweegt, waardoor de hefhoek voortdurend verdraait in een XYZ-vlak, de ingezette spierkracht van de gebruiker is niet egaal, werkstukken variëren in gewicht en er is altijd de impact van de vertraging tussen meting en uiteindelijke beweging. Vooral bij de start van de beweging is dat belangrijk, want op dat punt gaat de belasting meteen van 0 naar het maximumniveau. Ook de belasting zelf kan soms variëren, bijvoorbeeld bij vloeistofbidons waarin het product zich ook intern verplaatst.
Er zijn met andere woorden diverse sensortypes nodig om deze dynamische belasting in kaart te brengen:
- Krachtopnemers meten voortdurend de belasting van de gewrichten door de externe belasting en het gewicht van de ledematen na te gaan. Meestal gaat het om proportionele signalen. Naarmate de gemeten kracht toeneemt, verandert het elektrische signaal.
- Inertiesensoren meten dan weer de hoekverdraaiing van de ledematen, zo kan de controller de bewegingen van de actuatoren corrigeren volgens deze hoek.
- EMG-sensoren zijn afkomstig uit de medische sector en meten de spieractiviteit van de gebruiker.
- Encoders zorgen tot slot voor de broodnodige terugkoppeling van de positie naar de controller.
Actuatoren
De kwaliteit van de actuatoren is van absoluut topbelang bij exoskeletten. De eisen die er aan gesteld worden, zijn niet min: ze moeten licht en klein zijn, snel reageren op bewegingen van de operator, robuust zijn en veel belasting kunnen verwerken. Daar komen ook nog energiezuinigheid en onderhoudsgemak bij. De meest gebruikte actuators in exoskeletten zijn meestal elektrisch of elektropneumatisch, puur pneumatisch komt minder voor. Voor zware belastingen kunnen ook hydraulische actuatoren worden ingezet. Vooral het geringe gewicht speelt in het voordeel van elektrische actuatoren, want zij kunnen makkelijk met batterijen worden gevoed.
De actuator reageert op een mens van vlees en bloed met alle bijhorende mogelijke bewegingen
Het gebruik van actuatoren in traditionele automatiseringstoepassingen en exoskeletten vergt een andere benadering. Anders dan bij de ‘gewone’ automatisering, reageert de actuator hier niet op een vast afgelijnd patroon met mogelijke bewegingen, wel op een mens van vlees en bloed met alle bijhorende mogelijke bewegingen. Daar komt bovenop dat omwille van het gewicht en formaat, actuatoren vaak tegen hun limiet gekozen worden. Overdimensioneren omwille van ‘de zekerheid’ zoals bij andere applicaties wel eens gebeurt, is er bij exoskeletetten dus niet bij. Het onderzoek naar nieuwe vormen van actuatie is volop aan de gang en er zijn meerdere benaderingen in voege.
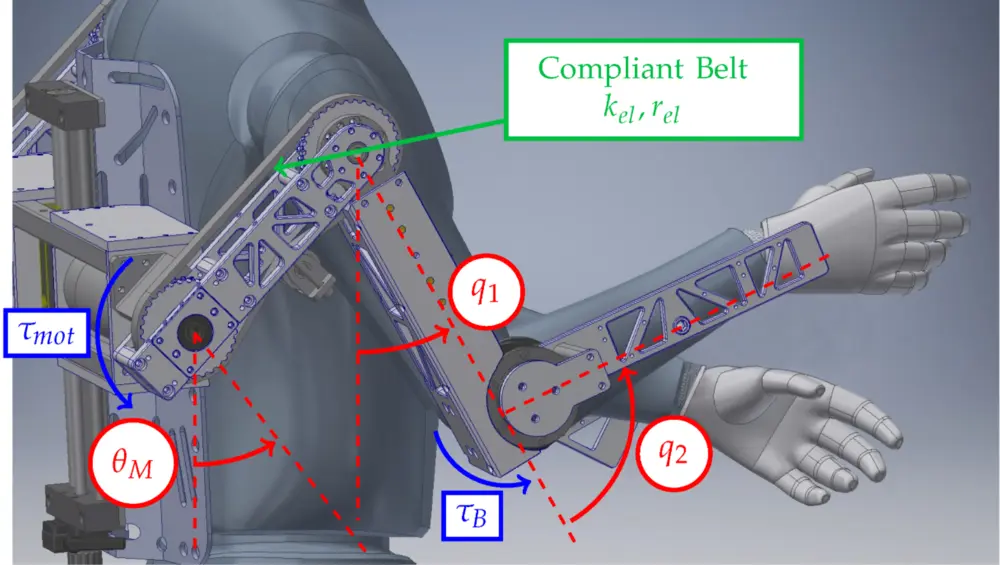
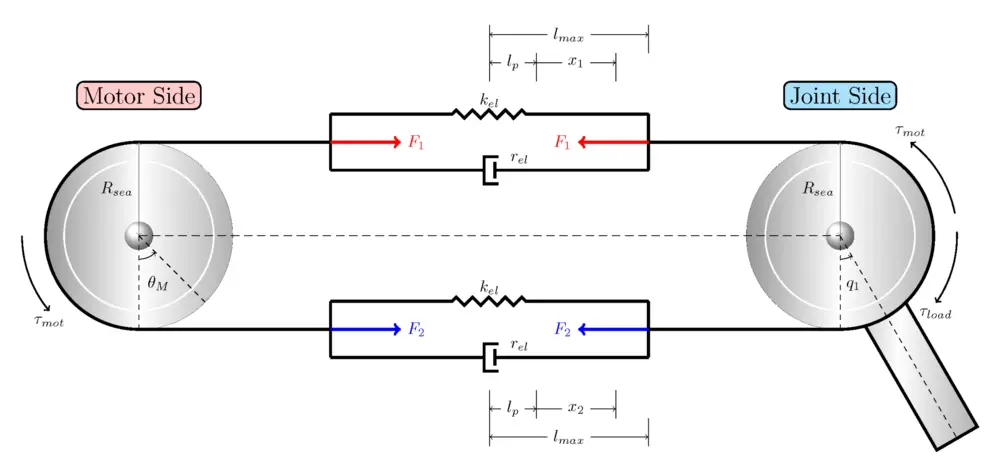
Om het koppel wat te controleren en wijzigingen egaal te verdelen, kan bijvoorbeeld gebruiktgemaakt worden van een veersysteem dat in serie met de actuator geplaatst wordt. Dat heeft 2 voordelen: plotse impacten worden gedempt en verminderen de inertie waarover gebruikers weleens durven klagen. Bovendien zorgt de demping ook voor minder belasting van de actuator zelf, wat bijdraagt aan de levensduur en de veiligheid. Deze zogenaamde SEA-actuatoren (series elastic actuator) zijn ondertussen wijdverspreid in de industriële exoskeletten.
Een andere benadering is de PEA (parallel elastic actuator), waarbij een veer met een afgestemde voorspanning parallel met de actuator geplaatst wordt. Daar waar een SEA vooral handig is voor het verwerken van piekbelastingen, zal een PEA vooral dienen om het gevraagde koppel van de motor beperkt te houden. Vandaag zijn er ook combinaties van beide - met de afkorting SPEA - die de voordelen van beide benaderingen verenigen door de veren in parallel slechts geleidelijk in te schakelen volgens de nood op dat moment. Daarnaast zijn er ook actuatoren die niet met een veer werken, maar zelf hun werking kunnen aanpassen in functie van de belasting door te variëren met hun stijfheid of hun weerstand.
Motoren
Ook de motoren in exoskeletten worden met andere eisen geconfronteerd, toch in vergelijking met hun collega’s in typische applicaties: een hoog koppel in combinatie met een lage snelheid bijvoorbeeld. De creatie van een hoog koppel vereist echter een aanzienlijke reductieratio, wat niet alleen nefast is voor de efficiëntie maar ook voor het gewicht. In een applicatie waarin dat laatste zeer belangrijk is voor de ergonomie van de werknemer, is dat geen onbelangrijk nadeel. Nu de markt stilaan groeit, kijken ook de motorontwerpers hoe ze het best deze uitdagingen kunnen verwerken.
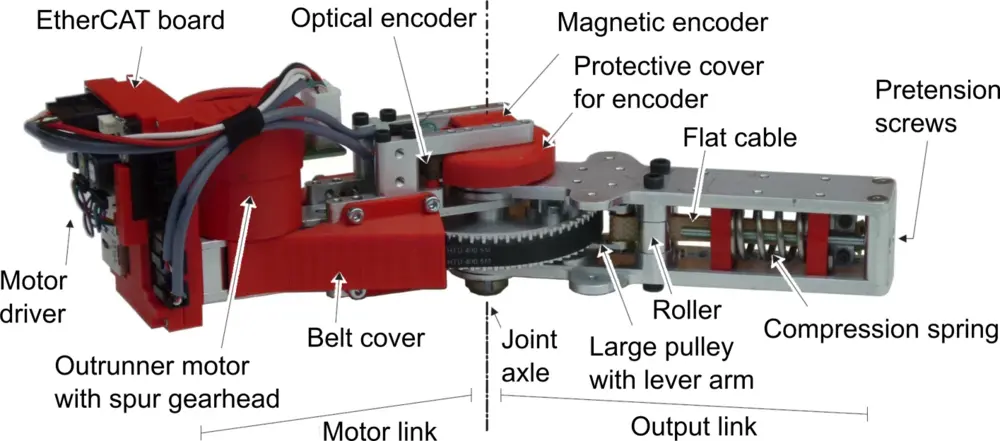
De meeste oplossingen werken met een miniatuur borstelloze DC-motor met verminderde inertie, waarbij de reductie via een plaatsbesparende planetaire reductiekast plaatsvindt. Om de positie voortdurend te verifiëren wordt verder gebruikgemaakt van encoders die via een bussysteem de exacte locatie van de actuator terugkoppelen. Er moet met andere woorden heel wat intelligentie en kracht op een zeer beperkte oppervlakte en met gering gewicht komen.


