Une excellente technologie mais avec des inconvénients pratiques
pleins feux sur les exosquelettes

Instructions de travail numériques, cobots, écrans tactiles,... ces dernières années, nous avons vu apparaître de belles innovations ayant toutes un objectif commun: faciliter le travail des opérateurs. C'est également le cas des exosquelettes, bien que nous soyons encore au début de la courbe d'apprentissage pratique de cette technologie. Dans cette phase-ci, la technologie est confrontée à des inconvénients qui surgissent dans la vie réelle.
Éviter les blessures
En substance, il y a bien sûr un raisonnement intéressant derrière cette technologie. Elle peut être utilisée dans de multiples secteurs, les soins de santé (en aidant les gens à réapprendre à marcher, par exemple) et l'industrie étant deux piliers importants. Dans cet article, nous nous limiterons à cette dernière catégorie et nous aborderons les exosquelettes motorisés et passifs. Les systèmes passifs stockent l'énergie cinétique produite par le travailleur par l'intermédiaire de ressorts et d'amortisseurs afin de la réutiliser lors des mouvements de levage. Avec les exosquelettes motorisés, c'est un entraînement externe qui fournit cette puissance. Dans ce dernier cas, il faut aussi un contrôleur avec des capteurs. Mais nous y reviendrons plus tard.

Il y a d'autres subdivisions à faire dans le monde des exosquelettes. On distingue souvent la partie du corps qui est soutenue. Il existe des exosquelettes pour la partie inférieure qui peuvent soutenir la marche ou la station debout, d'autres soutiennent le torse ou d'autres encore soutiennent le bras lors de tâches manuelles simples. Il y a aussi les exosquelettes dits complets qui combinent toutes ces fonctions de soutien. En outre, on fait parfois une distinction entre les squelettes anthropomorphes et non anthropomorphes, les premiers suivant de près la construction du corps humain.

La raison pour laquelle nous qualifions les exosquelettes de technologie intéressante est assez évidente. Soulever et manipuler sont encore souvent des activités purement manuelles. Tout ne peut pas être soulevé par des chariots élévateurs à fourche, des robots, des treuils, des ponts roulants ou d'autres dispositifs de levage. Cela entraîne toute une série de problèmes physiques pour les travailleurs. La plupart de ces problèmes peuvent être attribués à un surmenage dû au fait de soulever et de manipuler les marchandises ou d'effectuer des mouvements répétitifs. Dans notre pays - avec une population d'âge moyen et un âge de la retraite qui augmente -, nous avons toutes les raisons de vouloir étudier chaque possibilité de réduire les plaintes.
Il reste beaucoup de travail à faire dans le monde des exosquelettes
Les exosquelettes peuvent être un outil pour réduire les plaintes mais ils sont encore en phase d'implémentation. Nous les voyons aujourd'hui faire l'objet de tests approfondis en atelier,mais la véritable percée est encore à venir. Internet regorge de sites de fournisseurs mais dans la pratique, il reste quelques obstacles pratiques à son bon fonctionnement.
Il y a encore du chemin à parcourir, en particulier dans le domaine de la facilité d'utilisation. Par exemple, (le contrôle d') un exosquelette doit être spécifiquement adapté à l'anatomie de l'utilisateur afin d'obtenir un résultat optimal. Cela signifie que des ajustements doivent être effectués à chaque changement d'équipe, ce qui prend du temps. Commander un exosquelette individuel pour chaque travailleur est plus difficile financièrement.
Cela prend du temps de refaire les réglages à chaque changement d'équipe
Il y a également des inconvénients pratiques très simples: par exemple, les employés trouvent le système trop lourd pour l'enlever et le remettre lors d'un arrêt sanitaire ou d'un courte pause de midi.
Il existe également un certain nombre de plaintes pendant le travail proprement dit, comme la limitation de la mobilité. Bien que les exosquelettes prouvent leur utilité et remplissent sans problème leur fonction d'aide au levage, les travailleurs se plaignent de la limitation de leur liberté de mouvement. Si les tâches de levage du travailleur ne représentent qu'une petite partie de l'ensemble de ses tâches, nous ne voyons guère de valeur ajoutée pour l'instant.
Il existe également une barrière psychologique: ceux qui ne présentent aucun symptôme ne seront pas enclins à porter un exosquelette qui restreint les mouvements. Ce n'est que lorsqu'il est trop tard que les gens voient l'intérêt de cette solution. Enfin, le retour sur investissement est également difficile à mesurer. Les gains de productivité potentiels liés au fait de travailler plus vite ou de soulever des objets seuls plutôt qu'à deux ne sont pas clairs lorsqu'on les compare au temps supplémentaire nécessaire (enfilage et réglage du système, mobilité réduite ...). En outre, les gains en termes d'absentéisme ne sont toujours pas clairs. Les entreprises sont donc encore quelque peu réticentes à faire cet investissement dès maintenant.
construction technologique
Afin d'indiquer comment surmonter ces obstacles à l'avenir, nous devons examiner de plus près la technologie et son évolution. Nous pouvons ainsi indiquer où se trouvent les pistes d'amélioration potentielles.
Exosquelettes passifs
Les exosquelettes passifs impliquent généralement un soutien partiel de certaines parties du corps. Par exemple, les tâches répétitives sont soutenues grâce à un système d'amortisseurs et de ressorts. Les exosquelettes des membres supérieurs, qui sont utilisés pour faciliter les tâches d'assemblage répétitives dans le secteur des véhicules aériens, en sont un bon exemple. Comme ces solutions n'utilisent pas la combinaison d'actionneurs et de moteurs, il n'est pas nécessaire de disposer d'un bloc-batterie ni d'une alimentation électrique externe. Cela apporte un avantage significatif en termes de poids et d'ergonomie. En revanche, la charge utile est plutôt limitée par rapport aux systèmes motorisés, tandis que le contrôle des mouvements est largement absent.

Exosquelettes motorisés
Un exosquelette actif ou motorisé est constitué d'une armature métallique qui est placée autour du corps du travailleur. Ce cadre est équipé d'actionneurs à des endroits stratégiques qui soutiennent le mouvement du travailleur. Les actionneurs sont contrôlés par le contrôleur qui, à son tour, fonde la décision d'actionner - et la forme de l'actionnement - sur les données reçues des capteurs.
Nous allons expliquer tous ces éléments plus en détail.
Cadre
La limitation du poids est évidemment très importante pour accroître l'ergonomie de l'utilisateur. D'autre part, cette limitation ne doit pas avoir d'influence négative sur la résistance du matériau et sa flexibilité. La fibre de carbone, par exemple, est un matériau fréquemment utilisé, mais les alliages renforcés d'aluminium, de titane ou d'acier sont également fréquemment utilisés.
Capteurs
Plusieurs types de capteurs sont utilisés dans les exosquelettes. Idéalement, le contrôleur n'aurait qu'à compenser le poids du squelette et celui du membre de l'utilisateur, seule la charge supplémentaire momentanée devant être prise en compte comme facteur dynamique. En réalité, ce processus est beaucoup moins défini: la personne se déplace, ce qui fait que l'angle de levage tourne constamment dans un plan XYZ, la force musculaire appliquée par l'utilisateur n'est pas égale, le poids des pièces varie et il y a toujours l'impact du délai entre la mesure et le mouvement final. Ceci est particulièrement important au début du mouvement, car à ce moment la charge passe immédiatement de 0 au niveau maximum. La charge elle-même peut aussi varier, par exemple dans le cas de bouteilles de liquide, à l'intérieur desquelles le produit se déplace.
En d'autres termes, différents types de capteurs sont nécessaires pour identifier cette charge dynamique:
- Les capteurs de force mesurent en permanence la charge sur les articulations en vérifiant la charge externe et le poids des membres. Ce sont généralement des signaux proportionnels. Lorsque la force mesurée augmente, le signal électrique change.
- Les capteurs inertiels mesurent le déplacement angulaire des membres, de sorte que le contrôleur peut corriger les mouvements des actionneurs en fonction de cet angle.
- Les capteurs EMG, issus du secteur médical, mesurent l'activité musculaire de l'utilisateur.
- Les encodeurs fournissent au contrôleur le retour d'information nécessaire sur la position.
Actionneurs
La qualité des actionneurs est de la plus haute importance dans les exosquelettes. Les exigences sont élevées: ils doivent être légers et petits, réagir rapidement aux mouvements de l'opérateur, être robustes et capables de manipuler des charges importantes. En outre, ils doivent être efficaces sur le plan énergétique et faciles à entretenir. Les actionneurs les plus courants utilisés dans les exosquelettes sont généralement électriques ou électropneumatiques, le pneumatique pur étant moins courant. Pour les charges lourdes, on peut également utiliser des actionneurs hydrauliques. Le faible poids joue surtout en faveur des actionneurs électriques car ils peuvent facilement être alimentés par des batteries.
L'actionneur réagit à un être humain de chair et de sang et à tous ses mouvements possibles
L'utilisation d'actionneurs dans les applications d'automatisation traditionnelles et les exosquelettes nécessite une approche différente. Contrairement à l'automatisation 'normale', l'actionneur ne répond pas à un schéma fixe de mouvements possibles, mais à un être humain de chair et de sang avec tous ses mouvements possibles. De plus, en raison de leur poids et de leur taille, les actionneurs sont souvent choisis à leur limite. Au nom de la sécurité, les exosquelettes ne permettent pas un surdimensionnement, comme cela se fait parfois avec d'autres applications. La recherche sur les nouvelles formes d'actionnement bat son plein et plusieurs approches sont utilisées.

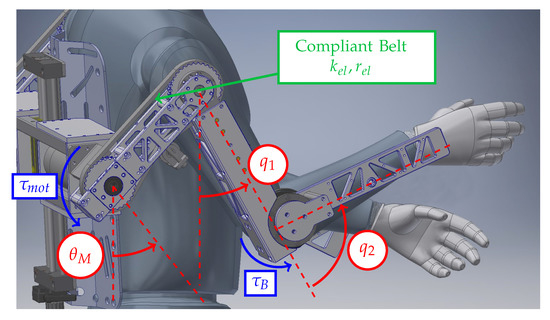
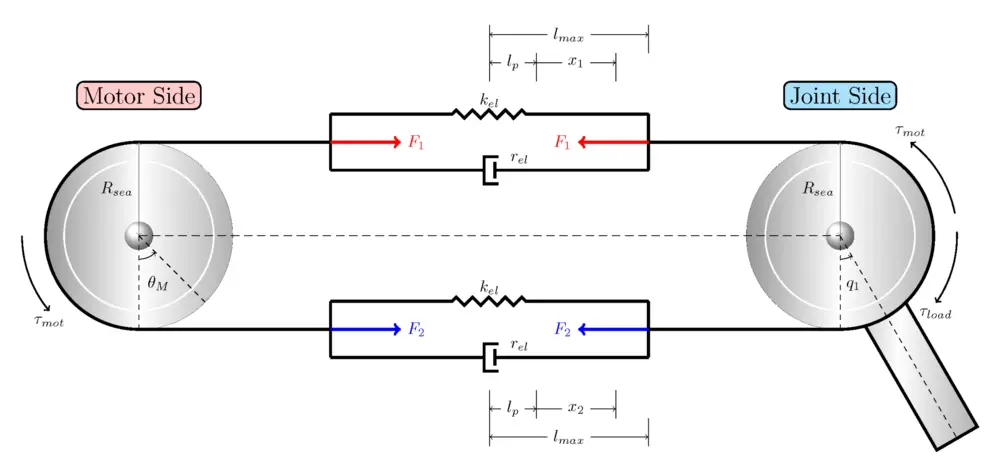
Pour contrôler le couple et répartir uniformément les changements, on peut utiliser un système de ressort placé en série avec l'actionneur. Cela présente deux avantages: les chocs soudains sont amortis et réduisent l'inertie dont se plaignent parfois les utilisateurs. En outre, l'amortissement réduit la charge sur l'actionneur proprement dit, ce qui contribue à la durée de vie et à la sécurité. Ces actionneurs dits SEA (series elastic actuator) sont maintenant très répandus dans les exosquelettes industriels.
Une autre approche est le PEA (parallel elastic actuator), où un ressort avec une précharge réglée est placé parallèlement à l'actionneur. Alors qu'un SEA est particulièrement utile pour traiter les charges de pointe, un PEA servira principalement à limiter les besoins en couple du moteur. Aujourd'hui, il existe également des combinaisons des deux - avec l'abréviation SPEA - qui combinent les avantages des deux approches en engageant progressivement les ressorts en parallèle selon le besoin du moment. Il existe également des actionneurs qui ne fonctionnent pas avec un ressort, mais qui peuvent adapter leur fonctionnement en fonction de la charge en faisant varier leur rigidité ou leur résistance.
Moteurs
Les moteurs des exosquelettes sont également confrontés à des exigences différentes, du moins par rapport à leurs homologues des applications typiques: un couple élevé combiné à une faible vitesse, par exemple. Cependant, la création d'un couple élevé nécessite un rapport de réduction important, ce qui est préjudiciable non seulement à l'efficacité mais aussi au poids. Dans une application où ce dernier est très important pour l'ergonomie du travailleur, ce n'est pas un inconvénient négligeable. Alors que le marché continue à se développer, les concepteurs de moteurs cherchent également la meilleure façon de relever ces défis.

La plupart des solutions fonctionnent avec un moteur CC miniature sans balais à inertie réduite, la réduction s'effectuant par l'intermédiaire d'un réducteur planétaire peu encombrant. Des encodeurs sont également utilisés pour vérifier en permanence la position, en renvoyant l'emplacement exact de l'actionneur via un système de bus. En d'autres termes, il faut mettre beaucoup d'intelligence et de puissance dans un espace et un poids très réduits.

