Manipulatie vereist gespecialiseerde 'handen'
Grijpers maken van robotarm nuttige manipulatietool

Robots zijn de werkpaarden van de industriële automatisatie. Met een industriële robot willen we uiteraard een verandering teweegbrengen in een productieproces. Zonder gespecialiseerde 'handen' is een robot echter gewoon een arm, in staat tot bewegen in de vrije ruimte, al zij het de ene al preciezer dan de andere. Vandaag de dag is er een enorm aanbod aan gereedschappen maar manipulatie van objecten blijft een van de belangrijkste taken van robots in de huidige automatisering. Denk maar aan assemblage of het verhandelen van materialen, zoals pick-en-place van grote houten platen in een zagerij of het oppikken van koeken van een transportband. Dit alles is niet mogelijk zonder grijper. Naast de mogelijkheden van het enorme gamma aan standaard grijpers is het potentieel van speciale grijpers een belangrijk aspect geworden bij de selectie.
Het onstaan van de grijper
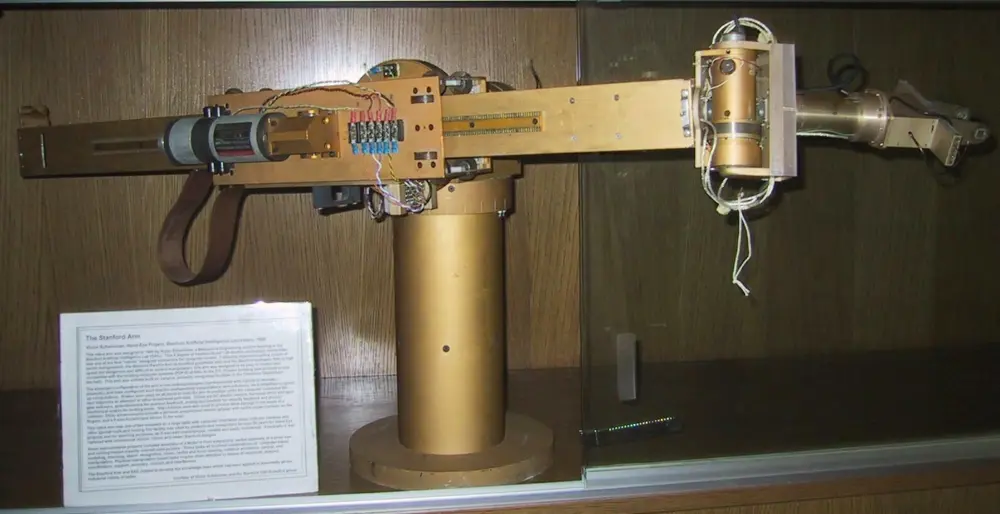
We gaan terug naar 1969: de Stanford Arm, een van de eerste elektrische robots ontworpen voor computergestuurde aansturing. In tegenstelling tot zijn hydraulische voorganger was deze eenvoudiger te controleren. Met zijn 6 vrijheidsgraden (5 roterende, 1 lineair) ideaal voor manipulatie met een grijper. Tussen de innovaties stak ook een servo-geactueerde proportionele grijper met tactiele sensoren op de vingers. Deze eerste grijper was een parallelle tweepuntsgrijper, een van de meest gebruikte grijperconfiguraties tot op de dag van vandaag t.g.v. de keep-it-simpleredenering. Hoewel dit type grijper nog steeds populair is, zien we nu meer en meer specifieke en speciale grijpers omwille van de toenemende complexiteit van de taken waarin robots ingezet worden.

SPECIALE GRIJPERS
Grijpen is vandaag veel meer dan een eenvoudige open-en-dichtbeweging van een parallelle tweepuntsgrijper. De complexiteit van veel toepassingen stelt specifieke eisen aan de grijper. De robot zelf, hoe nauwkeurig en flexibel inzetbaar ook, is niet allesbepalend voor de nauwkeurigheid of flexibiliteit van de grijptaak. Met een eenvoudige robot kan met behulp van een intelligente en slim gekozen of ontworpen grijper - in combinatie met een goede sturing - een complexe taak verricht worden, terwijl de beste robot in combinatie met de foute grijper kan resulteren in ongewenste performantie of zelfs falen van de manipulatie.
De complexiteit van veel toepassingen stelt specifieke eisen aan de grijper
De toepassing bepaalt dus alles en stelt specifieke eisen aan de grijper (en robot).

De rijzende vraag naar flexibele assemblage bv. doet de vraag stijgen naar zeer specifieke grijpers (voor manipulatie van complexe stukken binnen het assemblageproces) en ook zeer algemeen inzetbare grijpers (zodat een brede variëteit aan stukken kunnen worden gemanipuleerd).

Flexibel automatiseren met zeer specifieke grijpers vereist dan weer de bijkomende complexiteit en tijd van (automatische) gereedschapswisselaars en een magazijn aan grijpers, heel vergelijkbaar aan de CNC-wereld. Verschillende grijpers kunnen ook samen op 1 robot worden gemonteerd om deze gereedschapswissel ter vermijden. Denk maar aan een radiaalgrijper en een 2-vingergrijper die elk onder een hoek van 45° gemonteerd worden. Zo kan de robot zowel rechthoekige vormen als ronde vormen grijpen zonder toolwissel.
De grote nood aan zeer specifieke grijpers alsook zeer flexibel inzetbare grijpers resulteert in een toename van de diversiteit van het aanbod aan speciale grijpers en de toename in de ontwikkeling van op maat gemaakte grijpers.

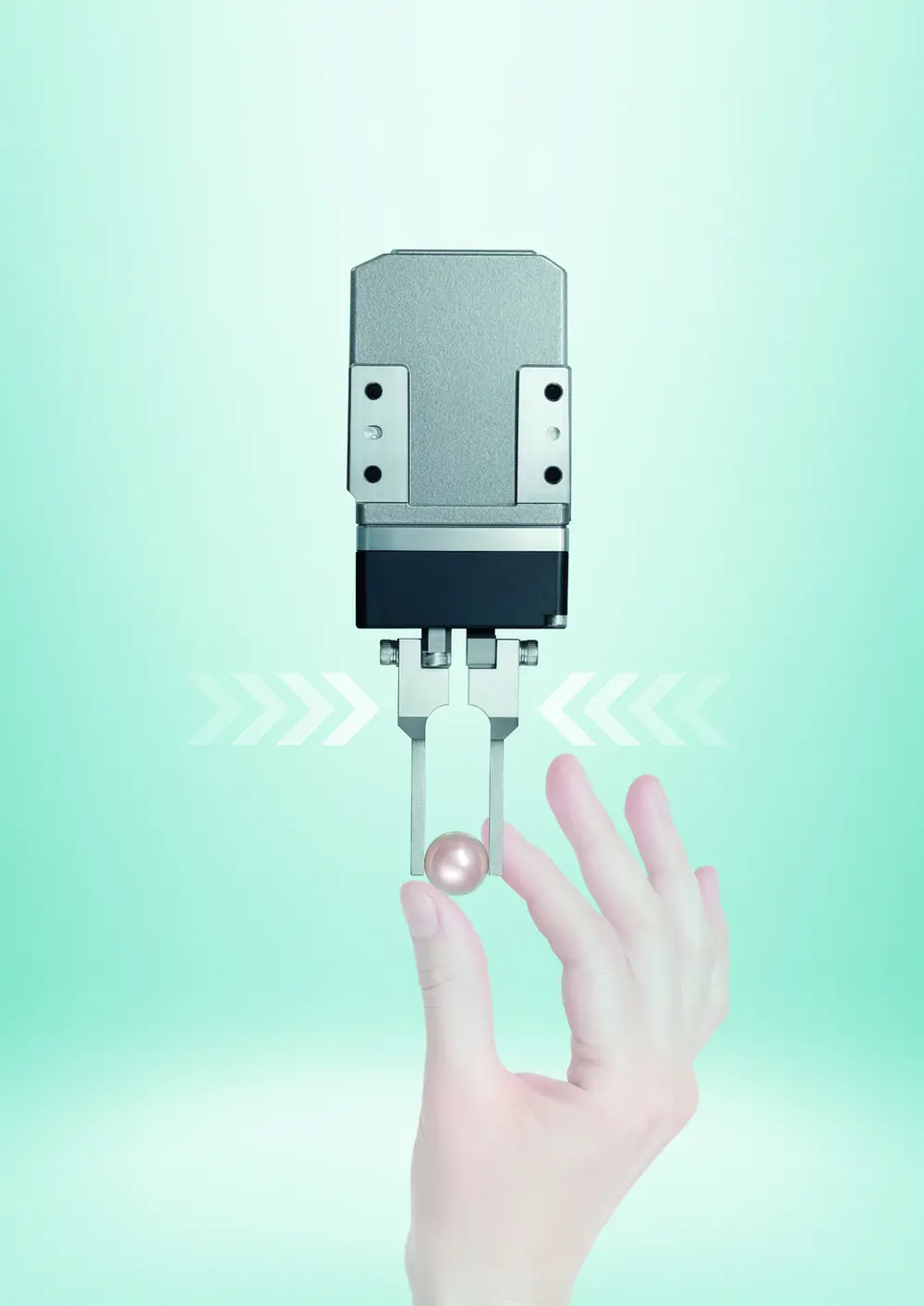
Programmeerbare grijpers vol sensoren
De Stanford Arm was al uitgerust met een servo-geactueerde proportionele grijper met tactiele sensoren op de vingers. Vandaag zijn ook commerciële varianten beschikbaar die volledig programmeerbaar zijn. Zo kunnen bv. snelheid, positie en kracht doorgaans ingesteld worden, waarbij ook een datafeedback voorzien wordt. Daarnaast kunnen bij sommige grijpers ook de vingers/klauwen onafhankelijk aangestuurd worden. Het grote voordeel is dat deze zeer flexibel inzetbaar zijn (grootte object, instelbare grijpkracht, snelheid van het dichtgaan van de vingers …).
Uitbreidingen voor standaard sensoren zijn voorhanden om bv. grijpkracht te meten en terug te koppelen, om een extra vrijheidsgraad te voorzien (vb. draaien van werkstuk als de robot geen vrijheidsgraden genoeg heeft) of extensiekits om het werkbereik van de robot te vergroten (vb. lineaire module).
Tussenmodules openen een nieuw arsenaal aan mogelijkheden
Tussenmodules
Tussenmodules (tussen grijper en roboteindeffector) openen een nieuw arsenaal aan mogelijkheden. Mechanische trillingen kunnen gecompenseerd worden door een specifiek daarvoor ontwikkelde tussenmodule met een intelligente sturing. Platte krachtcellen, die tussen grijper en eindeffector (eventueel 6-assig) gemonteerd kunnen worden, kunnen worden gebruikt voor het meten van interactiekracht (niet grijpkracht) met de omgeving, gegeven een rigide grijpen van het object. Dit om bv. krachtgebaseerde inserties te doen met een klassieke industriële robot.
Standaard grijpers met specifieke vingers
De meeste grijpers zijn voorzien van vingers. Ondanks het enorme gamma aan vingers wordt er soms gevraagd naar een specifieke vorm, of het inbouwen van bepaalde sensoren. Dit kan het geval zijn wanneer een robot zeer vorm-specifieke onderdelen moet vastgrijpen (automotive, verspaning, elektro-industrie, kunstofverwerking, gieterijen …). De opzetstukken voor de vingers kunnen in dat geval op maat worden gemaakt.
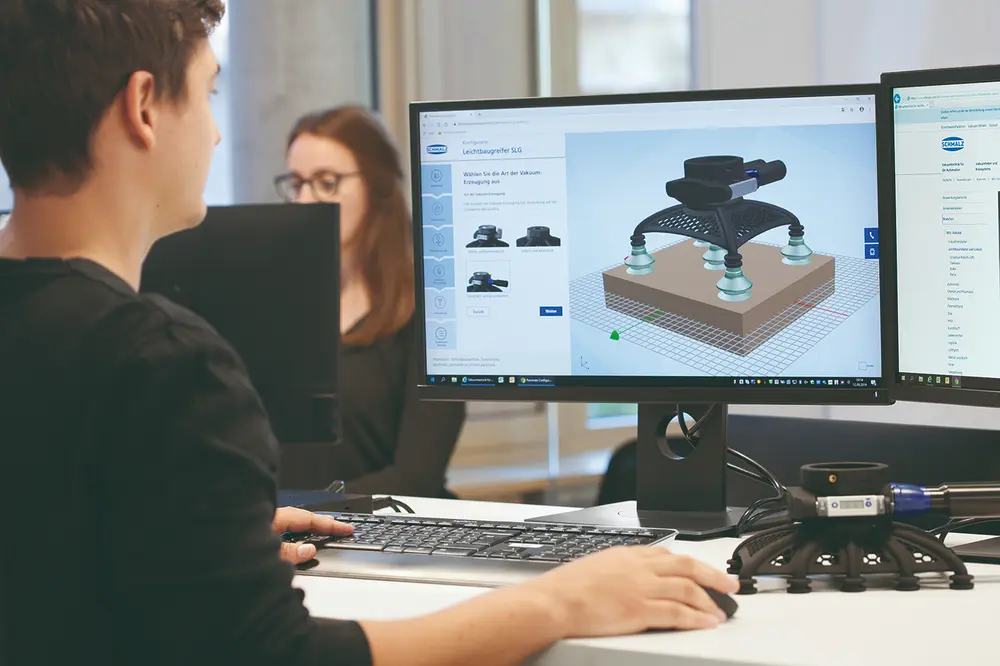
3D-printen: snel prototypen van vingers voor kleine batches tot kwalitatief eindproduct dat een groot aantal picks aankan
Vandaag biedt de 3D-printer een enorme waaier aan mogelijkheden: van snel prototypen van vingers voor kleine batches tot kwalitatief eindproduct dat een groot aantal picks aan kan. Met 3D-printen kunnen ook vormen gemaakt worden die doorgaans niet met klassieke verspanende bewerkingen mogelijk zijn en kunnen sensoren ingebed worden in de vinger. Gekende grijpermerken gaan in zee met gekende producenten van kwalitatieve 3D-printers in een volautomatisch en zeer snel bestelproces van 3D-geprinte vingers.
RobotHanden
Kijkend naar de ongelofelijke mogelijkheden van onze eigen hand, lijkt het logisch een robothand in te zetten. Om de enorme flexibiliteit te kunnen bieden, wordt de complexiteit natuurlijk gevoelig verhoogd.
De populairste robothanden zijn de gekende 3-vinger-grijpers waarbij de vingers individueel geactueerd worden met een motor en deze ook nog kunnen worden gepivoteerd zodat de vinger tegengesteld of in lijn gezet kunnen worden. Deze grijpers zijn er al sinds de late jaren 80 maar worden nu populair. Zowel snelheid als kracht kunnen geprogrammeerd worden.
Complexere handen zijn vandaag ook op de markt onder de vorm van een volwaardige hand met 5 vingers en bijvoorbeeld 9 motoren voor 20 gewrichten al dan niet met sensoren in de tippen. Het doel is om delicate handelingen nagenoeg even goed te kunnen uitvoeren als een mens. Mensachtige beweging vraagt uiteraard een zekere rekenkracht en complexe aansturing.
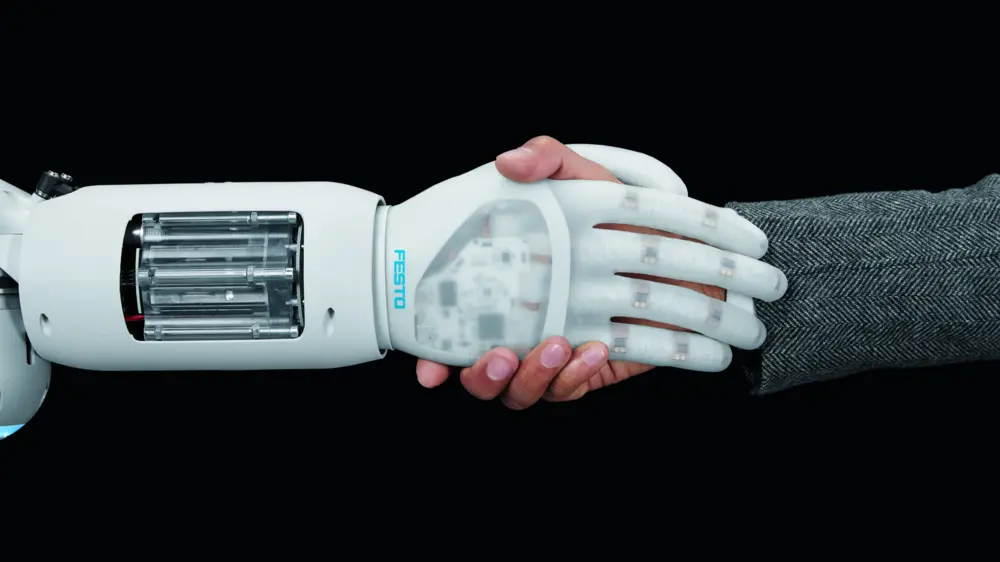
Een ander type robothanden is volledig pneumatisch gebaseerd. De actuatie gebeurt niet elektrisch met motoren in de gewrichten maar wel met luchtkamers in de vingers. Het vullen van de kamers resulteert in gesloten vingers terwijl bij lege luchtkamers de vingers gestrekt zijn. Precieze proportionele piëzoventielen, gemonteerd net onder de hand, zorgen voor een precieze aansturing van de vingers. Deze manier van aansturing zorgt ervoor dat slechts een enkele persluchtleiding nodig is naar de eindeffector van de robot. Het specifieke ontwerp van dergelijke grijper laat toe deze handen in te zetten in taken waar mens-robotinteractie nodig of gewenst is.
‘Soft Robotics’ grippers
In de context van de zogeheten ‘soft robotics’, het toelaten van zachte interactie met de omgeving en tegelijk ook in staat zijn grote kracht te realiseren, is de laatste jaren veel ontwikkeling op het gebied van grijpers, denk maar aan grijpers/handen met ‘zachte vingers’. Dergelijke soft robotics nemen meestal een voorbeeld aan biologische organismen (het zogeheten bio-mimicry).
Op maat gemaakte grijpers
In het geval dat de bovenstaande speciale, geavanceerde servo-grijpers, uitgerust met sensoren en/of tussenmodules, geen oplossing bieden voor specifieke eisen van de toepassing kunnen grijpers worden ontworpen door bijvoorbeeld een integrator. Typisch gaat men de eisen oplijsten en op basis van een grondig marktonderzoek bepalen als dergelijk specifieke ontwikkeling nodig is.

Cobotgrijpers
Grijpers voor cobots moeten net zoals de cobot zelf aan zeer specifieke eisen voldoen. Niet alle commerciële grijpers kunnen dus ingezet worden voor elke cobottoepassing. Kijk hiervoor dus naar speciaal gecertifieerde grijpers.
Voorbeelden van speciale grijpers binnen specifieke toepassingen
Heel specifieke toepassingen vragen speciaal ontworpen grijpers.
Het opschroeven van flessendoppen of deksels van bokalen is een mooi voorbeeld van toepassing waar het arsenaal aan grijpers met vingers niet inzetbaar is. Voor deze taak gebruikt men op maat gemaakte grijpers met klauwplaten, bijvoorbeeld in de vorm van de flessendop. Een bijkomende complexiteit is de maximaal toegelaten koppels bij het opschroeven van flessendoppen.

Ook voor het behandelen van voeding - zeker indien nog niet voorzien van verpakking - zijn gespecialiseerde grijpers noodzakelijk. Vaak wordt dan geopteerd voor vacuümgrijpers. Daarbij kan het grijperoppervlak uit materiaal bestaan dat goedgekeurd is voor direct en veilig contact met voeding.

Met het opkomen van robots in de agrarische sector opent ook een nieuwe markt voor op maat gemaakte grijpers omdat commerciële grijpers meestal niet aan de zeer specifieke eisen van deze markt voldoen. Er is een gigantisch verschil tussen grijpers die zacht fruit kunnen manipuleren en verhandelen op transportbanden (reeds talrijk aanwezig op de markt) en een grijper die zacht fruit kan plukken zonder schade. Daarvoor is een op maat gemaakte grijper nodig.
Conclusie
Heb je een speciale grijper nodig? Navigeer door de waaier aan mogelijkheden en opteer indien nodig voor een op maat gemaakte. De mogelijkheden zijn enorm.



