La manipulation nécessite des 'mains' spécialisées
les pinces transforment un bras robotique en un outil de manipulation utile

Les robots sont les bêtes de somme de l'automatisation industrielle. Le but d'un robot industriel est bien sûr d'apporter un changement dans un processus de production. Cependant, sans mains spécialisées, un robot n'est rien d'autre qu'un bras, capable de se déplacer dans un espace dégagé - même si certains modèles sont plus précis que d'autres. Il existe aujourd'hui une vaste gamme d'outils, mais la manipulation d'objets reste l'une des tâches les plus importantes des robots dans l'automatisation actuelle. Il suffit de penser à l'assemblage ou à la manipulation de matériaux, comme le pick & place de grandes planches en bois dans une scierie ou le ramassage de gâteaux sur un tapis roulant. Rien de tout cela n'est possible sans une pince. Outre les possibilités de la vaste gamme de pinces standard, le potentiel des pinces spéciales est devenu un aspect important dans la sélection.
L'origine de la pince
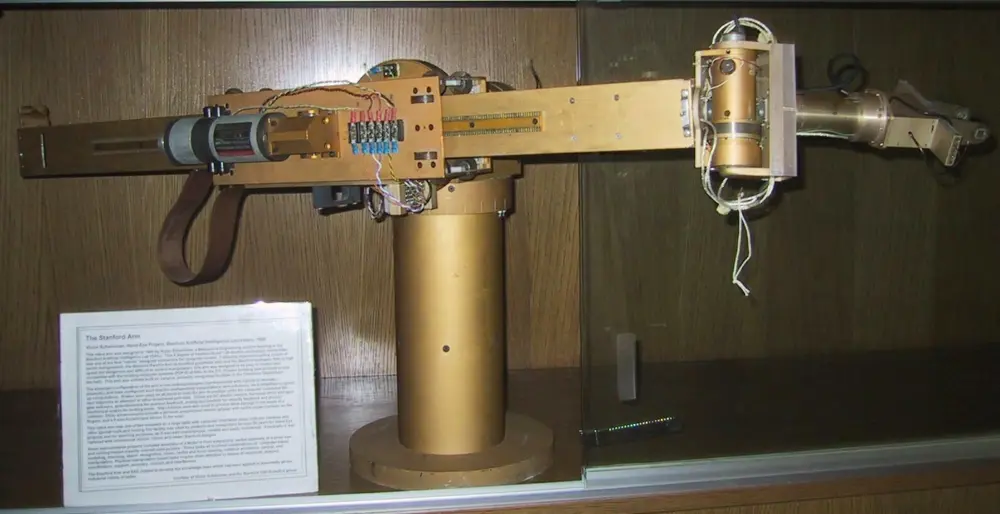
En 1969, le bras de Stanford est l'un des premiers robots électriques conçus pour une commande par ordinateur. Contrairement à son prédécesseur hydraulique, il était plus facile à commander. Avec ses 6 degrés de liberté (5 rotatifs, 1 linéaire), il était idéal pour la manipulation avec une pince. Parmi les innovations, il y avait également une pince proportionnelle servo-actionnée avec des capteurs tactiles sur les doigts. Cette première pince était une pince parallèle à deux points, l'une des configurations de pince les plus utilisées jusqu'à aujourd'hui dans un esprit 'keep-it simple'. Bien que ce type de pince soit toujours populaire, on voit de plus en plus de pinces spéciales et spécifiques en raison de la complexité croissante des tâches pour lesquelles les robots sont utilisés.

PINCES SPÉCIALES
Aujourd'hui, la préhension est bien plus qu'un simple mouvement d'ouverture et de fermeture d'une pince parallèle à deux points. La complexité de nombreuses applications impose des exigences spécifiques au préhenseur. Le robot, aussi précis et flexible soit-il, n'est pas le seul à déterminer la précision ou la flexibilité de la tâche de préhension. Avec un robot simple, une pince intelligente et intelligemment choisie ou conçue - en combinaison avec une bonne commande - est capable d'effectuer une tâche complexe, alors que le meilleur robot combiné à une mauvaise pince peut entraîner des performances médiocres, voire l'échec de la manipulation.
La complexité de nombreuses applications impose des exigences spécifiques au préhenseur
Les exigences spécifiques imposées à la pince (et au robot) dépendent de l'application.

La demande croissante d'assemblage flexible, par exemple, augmente la demande de préhenseurs très spécifiques (pour la manipulation de pièces complexes au sein du processus d'assemblage) et de préhenseurs universels (afin de pouvoir manipuler une grande variété de pièces).

Une automatisation flexible avec des pinces très spécifiques nécessite la complexité et le temps supplémentaires des changeurs d'outils (automatiques) et d'un magasin de pinces, très similaire au monde de la CNC. Il est également possible de monter plusieurs pinces sur un même robot afin d'éviter ce changement d'outil. Pensez à une pince radiale et à une pince à deux doigts, chacune étant montée sous un angle de 45°. Cela permet au robot de manipuler des formes rectangulaires et des formes rondes sans changer d'outil.
Le besoin important de pinces très spécifiques ainsi que de pinces très flexibles entraîne une augmentation de la diversité de l'offre de pinces spéciales et stimule le développement de pinces personnalisées.

Des pinces programmables remplies de capteurs
Le bras de Stanford était déjà équipé d'une pince proportionnelle servo-actionnée avec des capteurs tactiles sur les doigts. Aujourd'hui, il existe également des variantes commerciales entièrement programmables. Ainsi, il est généralement possible de régler la vitesse, la position et la force, avec un retour d'informations. En outre, certaines pinces peuvent commander les doigts et les griffes de manière indépendante. Leur grand avantage est qu'elles peuvent être utilisés de manière très souple (taille de l'objet, force de préhension réglable, vitesse de fermeture des doigts, etc.)

Des extensions pour les capteurs standard sont disponibles, par exemple pour mesurer la force de préhension, afin de prévoir un degré de liberté supplémentaire (par exemple, tourner la pièce lorsque le robot ne dispose pas de suffisamment de degrés de liberté) ou des kits d'extension pour augmenter la plage de travail du robot (par exemple, un module linéaire).
Les modules intermédiaires ouvrent un nouvel éventail de possibilités
Modules intermédiaires
Les modules intermédiaires (entre le préhenseur et l'effecteur final du robot) ouvrent une nouvelle gamme de possibilités. Les vibrations mécaniques peuvent être compensées par un module intermédiaire spécialement conçu à cet effet et doté d'un contrôle intelligent. Les cellules de puissance plates, qui peuvent être montées entre le préhenseur et l'effecteur final (éventuellement à 6 axes), peuvent être utilisées pour mesurer la force d'interaction (et non la force de préhension) avec l'environnement, compte tenu d'une prise rigide de l'objet. Il s'agit par exemple d'effectuer des insertions basées sur la force avec un robot industriel classique.
Pinces standard avec doigts spécifiques
La plupart des pinces sont équipées de doigts. Malgré l'énorme variété de doigts, il arrive qu'on ait besoin d'une forme spécifique ou de certains capteurs. Cela peut être le cas lorsqu'un robot doit saisir des pièces de forme très spécifique (automobile, usinage, industrie électrique, plasturgie, fonderie ...). Dans ce cas, les accessoires pour les doigts peuvent être fait sur mesure.
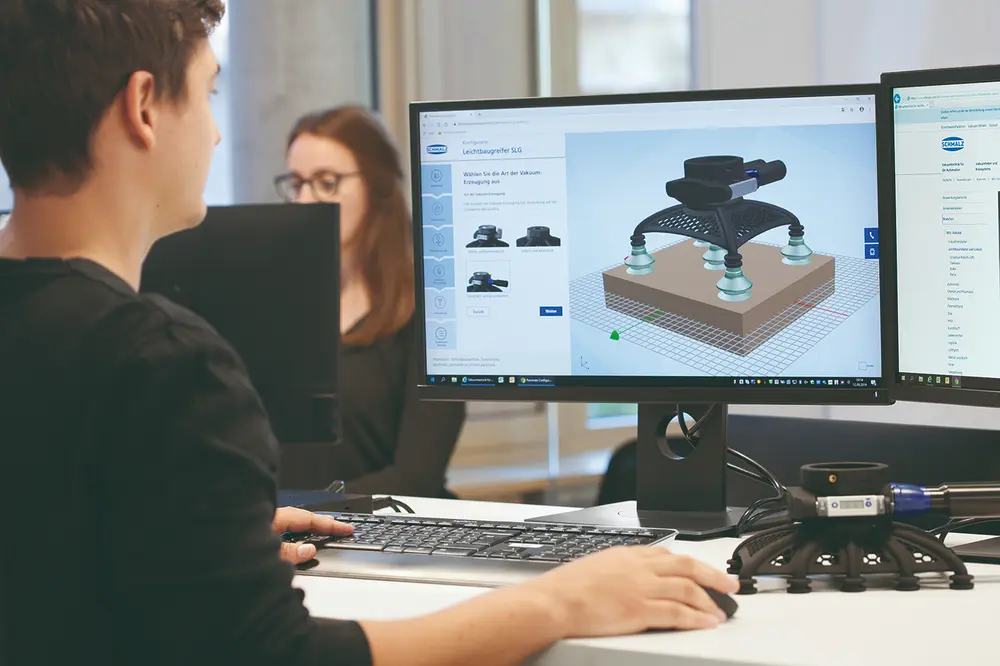
Impression 3D: prototypage rapide des doigts pour des petits lots jusqu'à un produit final de qualité pouvant gérer un grand nombre de picks
Aujourd'hui, l'imprimante 3D offre un énorme éventail de possibilités: du prototypage rapide de doigts pour des petits lots jusqu'à un produit final de haute qualité pouvant gérer un grand nombre de picks. L'impression 3D peut également être utilisée pour créer des formes qui ne sont généralement pas possibles avec l'usinage traditionnel, et des capteurs peuvent être intégrés dans le doigt. Des marques de pinces bien connues s'associent à des fabricants réputés d'imprimantes 3D de qualité dans le cadre d'un processus de commande entièrement automatisé et très rapide de doigts imprimés en 3D.
Mains robotiques
Si l'on considère les possibilités incroyables de notre propre main, il semble logique d'utiliser une main robotique. Bien entendu, pour offrir cette énorme flexibilité, la complexité est considérablement accrue.
Les mains robotiques les plus populaires sont les pinces à trois doigts bien connues, dans lesquelles les doigts sont actionnés individuellement par un moteur et peuvent être pivotés de manière à pouvoir être placés dans des directions opposées ou en ligne. Ces pinces existent depuis la fin des années 80 mais deviennent aujourd'hui populaires. Leur vitesse et leur puissance peuvent être programmées.
Aujourd'hui, il existe aussi des mains plus complexes sous la forme d'une main à part entière avec 5 doigts et, par exemple, 9 moteurs pour 20 articulations, avec ou sans capteurs dans les extrémités. L'objectif est d'être capable d'effectuer des actions délicates presque aussi bien qu'un humain. Un mouvement semblable à celui d'un être humain nécessite évidemment une certaine puissance de calcul et un contrôle complexe.
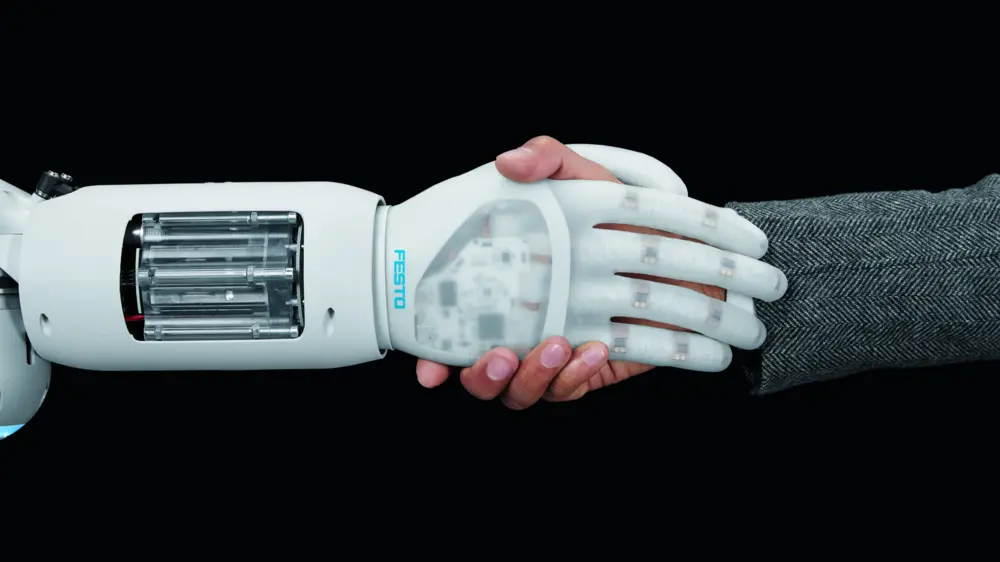
Un autre type de main robotique est entièrement basé sur la pneumatique. L'actionnement n'est pas électrique avec des moteurs dans les articulations mais avec des chambres à air dans les doigts. Le remplissage des chambres entraîne la fermeture des doigts tandis que lorsque les chambres sont vides, les doigts sont ouverts. Des valves piézoélectriques proportionnelles précises, montées juste sous la main, permettent un contrôle précis des doigts. Cette façon de commander les pinces ne nécessite qu'une seule conduite d'air comprimé vers l'effecteur du robot. La conception spécifique de ce genre de pince permet d'utiliser ces mains dans des tâches où l'interaction homme-robot est requise ou souhaitée.
pinces 'Soft Robotics'
Dans le contexte de la 'soft robotics', qui permet une interaction douce avec l'environnement tout en étant capable de réaliser une grande force, il y a eu beaucoup de développement dans le domaine des pinces ces dernières années. Pensons aux pinces/mains avec des 'doigts mous'. Cette robotique douce s'inspire généralement des organismes biologiques (ce que l'on appelle le bio-mimétisme).
pinces sur mesure
Dans le cas où les servo-pinces spéciales ci-dessus, équipées de capteurs et/ou de modules intermédiaires, ne permettent pas de répondre aux exigences spécifiques de l'application, les pinces peuvent être conçues, par exemple, par un intégrateur. En général, on énumère les exigences et, sur base d'une étude de marché approfondie, on détermine si ce genre de développement spécifique est nécessaire.

Pinces Cobot
Tout comme les cobots proprement dit, les pinces des cobots doivent répondre à des exigences très spécifiques. Toutes les pinces commerciales ne peuvent donc pas être utilisées pour toutes les applications cobots. Cherchez donc des pinces spécialement certifiées.
Exemples de pinces spéciales dans des applications spécifiques
Les applications très spécifiques nécessitent des pinces spécialement conçues.
Le vissage des bouchons de bouteilles ou des couvercles de bocaux est un bel exemple d'application où l'arsenal des pinces à doigts ne suffit pas. Pour cette tâche, on utilise des pinces à griffes faites sur mesure, par exemple en forme de bouchon de bouteille. Le couple maximal autorisé pour le vissage des bouchons de bouteilles constitue une complexité supplémentaire.

Il faut aussi des pinces spécialisées pour la manipulation des aliments, surtout s'ils ne sont pas encore emballés. On choisit souvent des pinces sous vide. La surface de la pince peut être constituée d'un matériau approuvé pour un contact direct et sûr avec les aliments.

L'émergence des robots dans le secteur agricole ouvre également un nouveau marché pour les pinces personnalisées, car les pinces commerciales ne répondent généralement pas aux exigences très spécifiques de ce marché. Il y a une énorme différence entre des pinces qui peuvent manipuler et traiter des fruits tendres sur des tapis roulants (déjà nombreuses sur le marché) et une pince qui peut cueillir des fruits tendres sans les abîmer. Pour cela, il faut une pince sur mesure.
Conclusion
Vous avez besoin d'une pince spéciale? Naviguez à travers l'éventail des possibilités et optez pour une solution personnalisée si nécessaire. Les possibilités sont légion.