Flexibele assemblage met robots biedt perspectieven
Onbenut potentieel voor high-mix low-volume productie
Industriële robots worden veelvuldig gebruikt in verschillende toepassingsdomeinen, zoals de verhandeling van materialen, lassen en solderen, assemblage en de-assemblage, palletiseren en verpakken, verven en doseren, en verspanen. Assemblage blijft een belangrijk toepassingsgebied, geschat op 15% van de totale wereldwijde markt van industriële robots. Dit geldt vooral voor de automobielsector, die de tweede grootste markt is voor robots, na de elektronicasector (respectievelijk 136.000 en 157.000 jaarlijkse installaties van robots in 2022).

Trends in assemblage
Het gebruik van robots voor assemblage leent zich vooral doordat ze een brede waaier aan mogelijkheden bieden in de manipulatie van stukken, met grotere nauwkeurigheid en snelheid dan manuele assemblage. Voordelen die hieruit vloeien zijn onder andere een verhoogde productiviteit (kortere cyclustijden), een verbeterde efficiëntie (kortere omsteltijden ten opzichte van manuele assemblage en een geoptimaliseerde flow) en een verhoogde kwaliteit. Robots bieden het potentieel om minder fouten te introduceren, en indien uitgerust met extra sensoren zoals camera's kunnen fouten in stukken, het proces en de finale assemblage gedetecteerd worden.
Vandaag worden robots in assemblage ingezet in vaste productielijnen, die de hele dag dezelfde onderdelen assembleren. De huidige vraag in de markt drijft echter weg van serieproductie naar mass customization en bijgevolg een grote variëteit aan opties en mogelijkheden op eenzelfde product. Dit type productie moet echter ook tegen de kosten van serieproductie gerealiseerd kunnen worden om concurrerend te zijn.

In een bredere context kijken we naar 'high-mix low-volume' (HMLV)-productie, ofwel de vraag om productie te kunnen realiseren van een grote variatie van producten in kleine hoeveelheden. Dit kan zelfs leiden tot een productie van telkens unieke stukken omdat de mogelijkheden zo groot zijn dat productie van twee dezelfde machines/producten bijna niet voorkomt.
Concrete strategieën
Om deze HMLV te kunnen realiseren tegen de kosten van serieproductie, is het noodzakelijk om een hoge mate van flexibiliteit te combineren met een hoge productiviteit (of lage kosten per product). De vraag is dan welke flexibiliteit nodig is om dergelijke mogelijkheden te bieden. We kijken hier naar verschillende aspecten van het productieproces, zoals flexibiliteit van de lay-out van de werkcel/productievloer maar ook flexibiliteit van de aansturing.
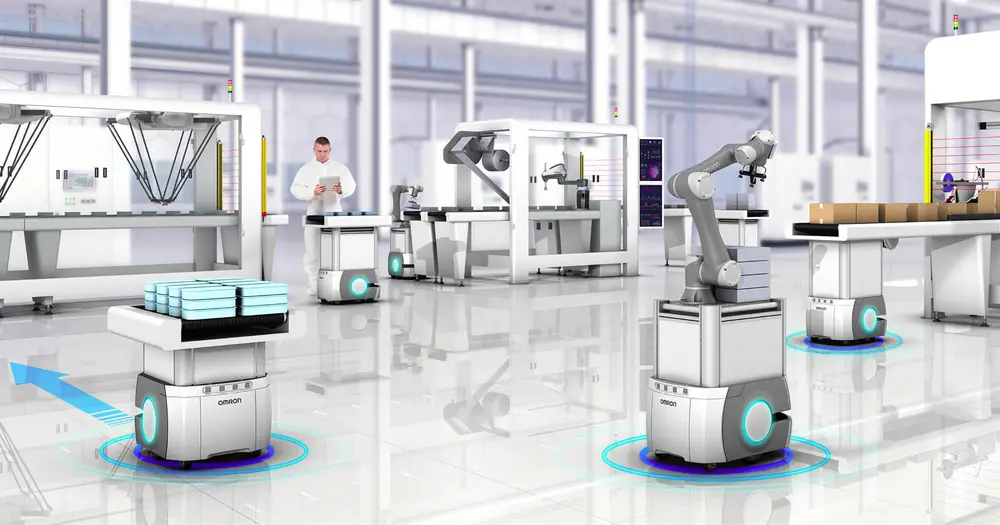
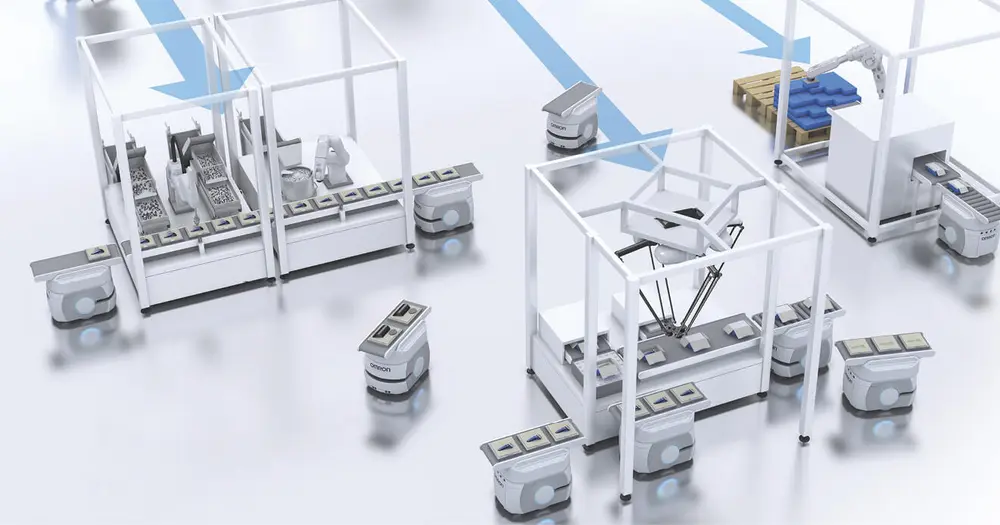
Een flexibele werkcel of productielay-out vereist een ander concept of ontwerp van de werkcellen in vergelijking met een klassiek ontwerp, dat de mogelijkheid biedt om deze eenvoudig te herconfigureren wanneer nodig, afhankelijk van de te produceren producten. Denk maar aan gereedschappen die van de ene cel makkelijk naar de andere cel moeten kunnen verplaatst worden. Zo zijn er concepten waarbij zowel werkstukken, personen, werkstations, robots … mobiel zijn zodat de werkvloer kan aangepast worden aan een grote variatie aan producten.
Om HMLV te kunnen realiseren tegen de kost van serieproductie is er nood aan flexibiliteit én een hoge productiviteit
Flexibiliteit in aansturing geldt op verschillende niveaus, zoals planning, maar ook aansturing van de actoren zelf. Mensen zijn bijzonder flexibel inzetbaar, zowel naar locatie als taak, waardoor manuele assemblage bijgevolg bijzonder flexibel is. De keerzijde is dat manuele assemblage te maken heeft met hoge kosten. Aan de andere kant is automatisering, onder andere via robotica, kostenefficiënt voor serieproductie, maar minder inzetbaar in een context van HMLV.
De vraag rijst dan ook hoe HMLV-productie op een kosteneffectieve manier gerealiseerd kan worden. Dit kan enerzijds door de kost van manuele assemblage te reduceren, en anderzijds door het combineren van automatische assemblage met manuele assemblage. Wanneer hier een goede mix gevonden kan worden, kunnen operatoren heel effectief ingeschakeld worden in een flexibele setting ter aanvulling van automatisatie.

Personeel gezocht
Naast de kosten is een van de problemen met manuele assemblage echter het vinden van de juiste mensen. Volgens de EU heeft 78% van de kmo's in de EU, gezien als de ruggengraat van de Europese economie, problemen om mensen te vinden met de juiste competenties. Een tekort aan dit soort personeel heeft aanzienlijke gevolgen voor de dagelijkse activiteiten van deze bedrijven. Daarnaast wordt gemeld dat kmo's in de maakindustrie de grootste kans hebben om problemen te ondervinden met het aantrekken van gekwalificeerd personeel.
Een andere mogelijkheid om kosteneffectieve HMLV te realiseren is het verhogen van de flexibiliteit van automatisering en robots. Als we kijken naar de kostenverdeling van het installeren van een robot, zien we dat deze in de loop van de tijd geëvolueerd is. De totale kost is sinds 2005 verminderd met een derde, maar de kost van het programmeren blijft aanzienlijk: 34% in 2020.
Dit aandeel is evenwel gereduceerd ten opzichte van 2005, waar dit nog 44% van totale kosten was, mede door inspanningen om eenvoudige gebruikersinterfaces te creëren. Vooral in de cobotsector zijn daar significante verbeteringen gemaakt, zoals de introductie van eenvoudige programmeertalen en teach-inmethodes.
Wanneer je elke week een andere productvariant wenst te produceren in een HMLV-context en de programmatie van de robot een dag vraagt, dan is het niet zozeer de moeite om te automatiseren. Zowel kost als tijd blokkeren de mogelijkheid om robots flexibel in te zetten. Bijkomend kan men de bedenking maken wat er gewonnen wordt wanneer manuele arbeid vervangen wordt door een ingenieur die de robot programmeert.
In een HMLV-context moet de robot bijgevolg op een eenvoudige en minimale manier kunnen worden geprogrammeerd door niet-experts. In die context zijn al enkele jaren initiatieven lopende bij onderzoeksinstellingen en industriële spelers. Hun focus ligt op het creëren van methodes om de manuele programmatie van robots tot een minimum te herleiden, zodat robotisering loont in een flexibele assemblagecontext. Grote stappen zijn reeds gezet, met mooie realisaties tot gevolg.
In die context biedt skill-based programming het potentieel om de programmeertijd drastisch te verlagen. Het idee hierachter zit hem in het hergebruiken van bepaalde 'skills' van een robot. Dergelijke skills zijn bijvoorbeeld een pick-and-placebeweging, of het plaatsen van een as in een gat onder krachtcontrole. Skills kunnen we zien als de mogelijkheid om een bepaalde taak te volbrengen, en die als geparametriseerd robotprogramma voorhanden zijn (nadat ze geprogrammeerd zijn of beschikbaar zijn in een bibliotheek). Parameters kunnen dan bijvoorbeeld drop-offlocatie zijn, of de kracht waarmee iets moet vastgegrepen worden met een grijper.
Het programmeren van de robot wordt dan het vertalen van taken in de juiste parameters voor een bepaalde robotskill, in plaats van het schrijven van een robotprogramma. Neem nu als voorbeeld het robotisch vastschroeven van vier bouten van type M4 op bepaalde locaties. Die taak wordt vertaald in het viermaal oproepen van de 'schroef die bout vast'-skill met de juiste parameters (bv. locatie), waarbij de nodige tussenstappen idealiter automatisch gegenereerd worden (zoals een eventuele gereedschapswissel). Deze manier van programmeren laat een grote flexibiliteit toe met minimale hoeveelheid aan programmeren. Kleine aanpassingen in productvarianten resulteren slechts in aanpassen van skillparameters, die al dan niet automatisch gebeuren vanuit productinformatie.
Conclusie
Flexibele assemblage is het antwoord op de HMLV-productie uitdagingen die we zien in de toekomst. Het inzetten van automatisering in een HMLV-context is uitermate zinvol omdat het een antwoord kan bieden op uitdagingen zoals het gebrek aan geschikte arbeiders. Daarnaast kunnen kwaliteitsproblemen, ergonomische aspecten van manuele assemblage of plannen voor opschaling van de productie een drijvende factor zijn voor inzetten van automatische flexibele assemblage.













