L'assemblage flexible avec des robots offre des perspectives
Un potentiel inexploité pour la production high mix low volume
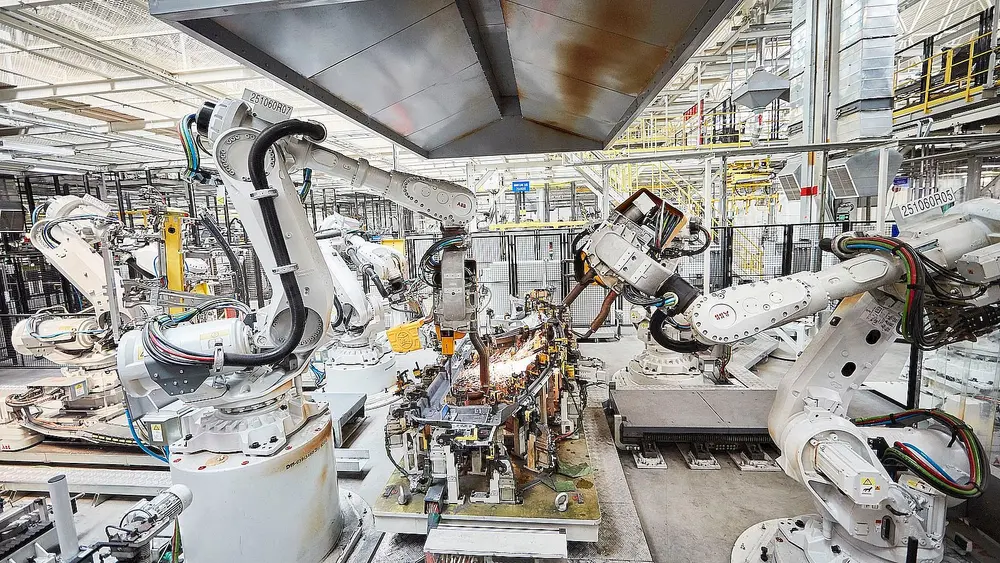
Les robots industriels sont largement utilisés dans divers domaines d'application, tels que la manutention des matériaux, le soudage et le brasage, l'assemblage et le désassemblage, la palettisation et l'emballage, la peinture et la distribution, et l'usinage. L'assemblage reste un domaine d'application important pour les robots industriels, estimé à 15% du marché mondial total. Ceci est particulièrement vrai dans le secteur automobile, qui est le deuxième marché le plus important pour les robots industriels, après le secteur de l'électronique (respectivement 136.000 et 157.000 installations annuelles de robots en 2022).

Tendances en matière d'assemblage
L'utilisation de robots pour l'assemblage se justifie principalement par le fait qu'ils offrent un large éventail d'options dans la manipulation des pièces, avec une précision et une rapidité supérieures à celles de l'assemblage manuel. Les avantages qui en découlent sont notamment une productivité accrue (temps de cycle plus courts), une meilleure efficacité (temps de changement plus courts par rapport à l'assemblage manuel et flux optimisé) et une meilleure qualité. Les robots offrent la possibilité de réduire le nombre d'erreurs et, s'ils sont en outre équipés de capteurs tels que des caméras, ils peuvent détecter les erreurs dans les pièces, le processus et l'assemblage final.
Aujourd'hui, les robots d'assemblage sont déployés sur des lignes de production fixes, assemblant les mêmes pièces tout au long de la journée. Cependant, la demande actuelle du marché s'éloigne de la production en série pour s'orienter vers la personnalisation de masse et, par conséquent, vers une grande variété d'options et de possibilités sur un même produit. Toutefois, pour être compétitif, ce type de production doit être réalisable au coût de la production de masse.

Dans un contexte plus large, nous considérons la production 'high-mix low-volume' (HMLV), ou la demande de pouvoir produire une grande variété de produits en petites quantités. Cela peut même conduire à la production de pièces uniques à chaque fois, car les possibilités sont si grandes que la production de deux machines/produits identiques est pratiquement inexistante.
Stratégies concrètes
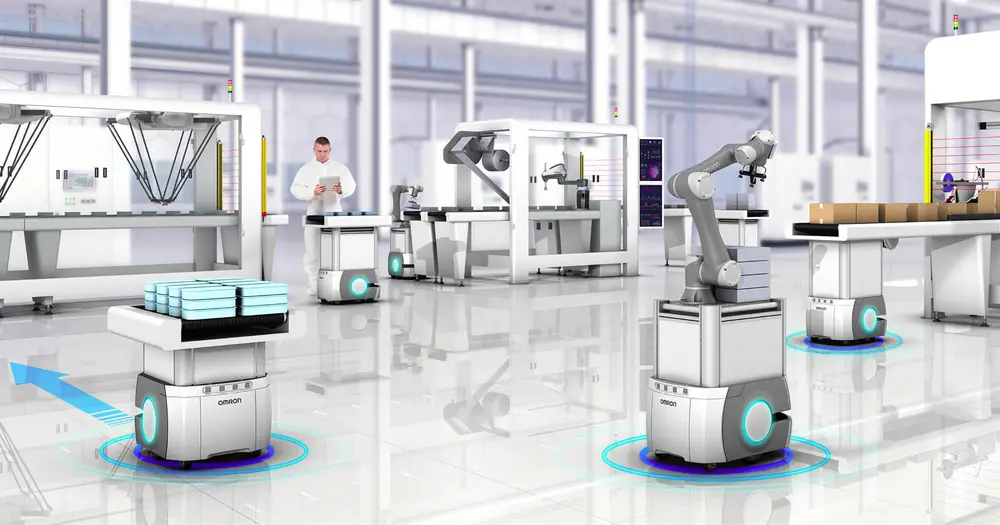
Pour pouvoir réaliser la production HMLV au coût de la production en série, il est nécessaire de combiner une grande flexibilité avec une grande productivité (ou un faible coût par produit). La question est alors de savoir quelle flexibilité est nécessaire pour offrir ce genre de possibilités. Nous examinons ici différents aspects du processus de production, tels que la flexibilité de l'agencement de la cellule de travail ou de l'atelier de production, mais aussi la flexibilité du contrôle.
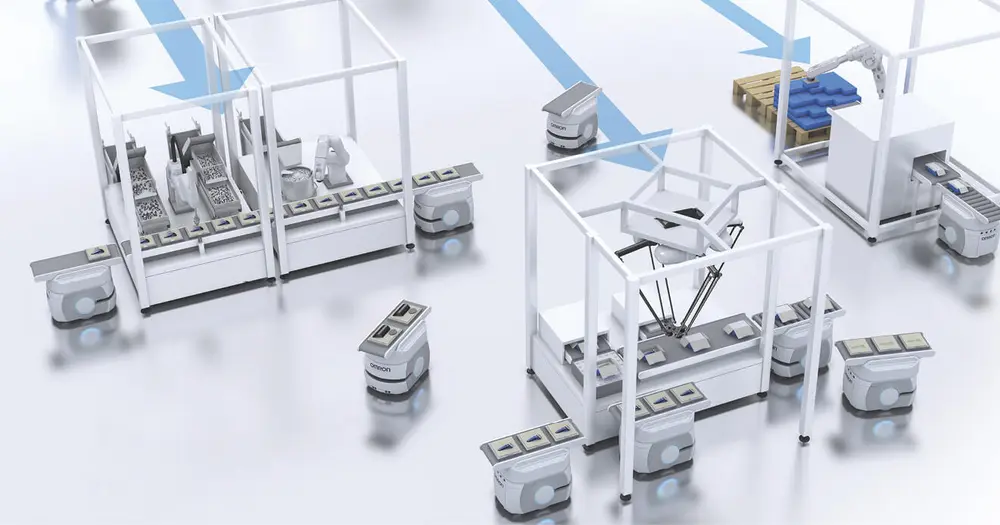
Une cellule de travail ou un agencement de production flexible nécessite une conception différente par rapport à une situation traditionnelle, qui permet une reconfiguration facile en cas de besoin, en fonction des produits à fabriquer. Pensons aux outils qui doivent être facilement déplacés d'une cellule à l'autre. Il existe donc des concepts dans lesquels les pièces, les personnes, les postes de travail, les robots... sont mobiles, de sorte que l'atelier peut être adapté à une grande variété de produits.
Pour pouvoir réaliser la production HMLV au coût de la production en série, il faut de la flexibilité et une productivité élevée
La flexibilité du contrôle s'applique à différents niveaux, tels que la planification, mais aussi le contrôle des acteurs proprement dit. Le personnel peut être déployé de manière très flexible, à la fois en fonction du lieu et de la tâche, ce qui rend l'assemblage manuel particulièrement souple. L'inconvénient est que l'assemblage manuel entraîne des coûts élevés. D'autre part, l'automatisation, y compris par la robotique, est rentable pour la production en série, mais moins utilisable dans un contexte de HMLV.
La question se pose donc de savoir comment réaliser une production HMLV de manière rentable. Cela peut se faire, d'une part, en réduisant le coût de l'assemblage manuel et, d'autre part, en combinant l'assemblage automatique et l'assemblage manuel. Si l'on parvient à trouver une bonne combinaison, les opérateurs peuvent être employés de manière très efficace dans un cadre flexible pour compléter l'automatisation.

Recherche de personnel
Outre le coût, l'un des problèmes de l'assemblage manuel est de trouver le personnel adéquat. Selon l'Union européenne, 78% des PME européennes, considérées comme l'épine dorsale de l'économie européenne, ont des difficultés à trouver des personnes possédant les compétences requises. Une pénurie de ce type de personnel a un impact significatif sur les activités quotidiennes de ces entreprises. En outre, ce sont les PME de l'industrie manufacturière qui sont les plus susceptibles de rencontrer des difficultés pour attirer du personnel qualifié.
Un autre moyen de parvenir à une fabrication HMLV rentable est d'accroître la flexibilité de l'automatisation et des robots. Lorsqu'on examine la répartition des coûts d'installation d'un robot, on constate qu'elle a évolué au fil du temps. Le coût total a été réduit d'un tiers depuis 2005, mais le coût de la programmation reste important: 34% en 2020.
Toutefois, cette part a diminué par rapport à 2005, où elle représentait 44% du coût total, en partie grâce aux efforts déployés pour créer des interfaces utilisateur simples. Des améliorations significatives ont été apportées, notamment dans le secteur des cobots, avec l'introduction de langages de programmation simples et de méthodes d'apprentissage.
Si vous souhaitez produire une variante de produit différente chaque semaine dans un contexte HMLV et que la programmation du robot prend toute une journée, cela ne vaut guère la peine d'automatiser. Le coût et le temps bloquent la possibilité d'utiliser les robots de manière flexible. En outre, on peut considérer ce qui est gagné lorsque le travail manuel est remplacé par un ingénieur qui programme le robot.
Par conséquent, dans un contexte de HMLV, le robot devrait pouvoir être programmé de manière simple et minimale par des non-experts. Dans ce contexte, des initiatives sont en cours depuis plusieurs années parmi les institutions de recherche et les acteurs industriels. Leur objectif est de créer des méthodes permettant de minimiser la programmation manuelle des robots afin que la robotisation soit rentable dans un contexte d'assemblage flexible. De grands progrès ont déjà été accomplis et ont donné lieu à de belles réalisations.
Dans ce contexte, la programmation basée sur les compétences offre la possibilité de réduire considérablement le temps de programmation. L'idée sous-jacente consiste à réutiliser certaines 'compétences' d'un robot. Il peut s'agir, par exemple, d'un déplacement de type 'pick-and-place' ou du placement d'un axe dans un trou sous contrôle de la force. Les compétences peuvent être considérées comme la capacité d'accomplir une tâche particulière et être disponibles sous la forme d'un programme robotique paramétré (après avoir été programmées ou disponibles dans une bibliothèque). Les paramètres peuvent alors être, par exemple, l'emplacement de la dépose ou la force avec laquelle un objet doit être saisi à l'aide d'une pince.
La programmation du robot consiste alors à traduire les tâches en paramètres appropriés pour une compétence donnée du robot, plutôt que d'écrire un programme de robot. Prenons l'exemple du vissage robotisé de quatre boulons de type M4 à certains endroits. Cette tâche est traduite en appelant quatre fois la compétence 'visser ce boulon' avec les paramètres corrects (par exemple, l'emplacement), les étapes intermédiaires nécessaires étant idéalement générées automatiquement (comme tout changement d'outil). Ce mode de programmation permet une grande flexibilité avec un minimum de programmation. Des changements mineurs dans les variantes de produits entraînent uniquement une modification des paramètres de compétence, qui peut éventuellement se faire automatiquement à partir des informations sur les produits.
Conclusion
L'assemblage flexible est la réponse aux défis de la fabrication HMLV qui nous attendent. Le déploiement de l'automatisation dans un contexte HMLV est extrêmement utile car il peut répondre à des défis tels que le manque de travailleurs appropriés. En outre, les problèmes de qualité, les aspects ergonomiques de l'assemblage manuel ou les projets d'augmentation de la production peuvent constituer un facteur déterminant pour le déploiement de l'assemblage flexible automatisé.














